





























86
b5-02
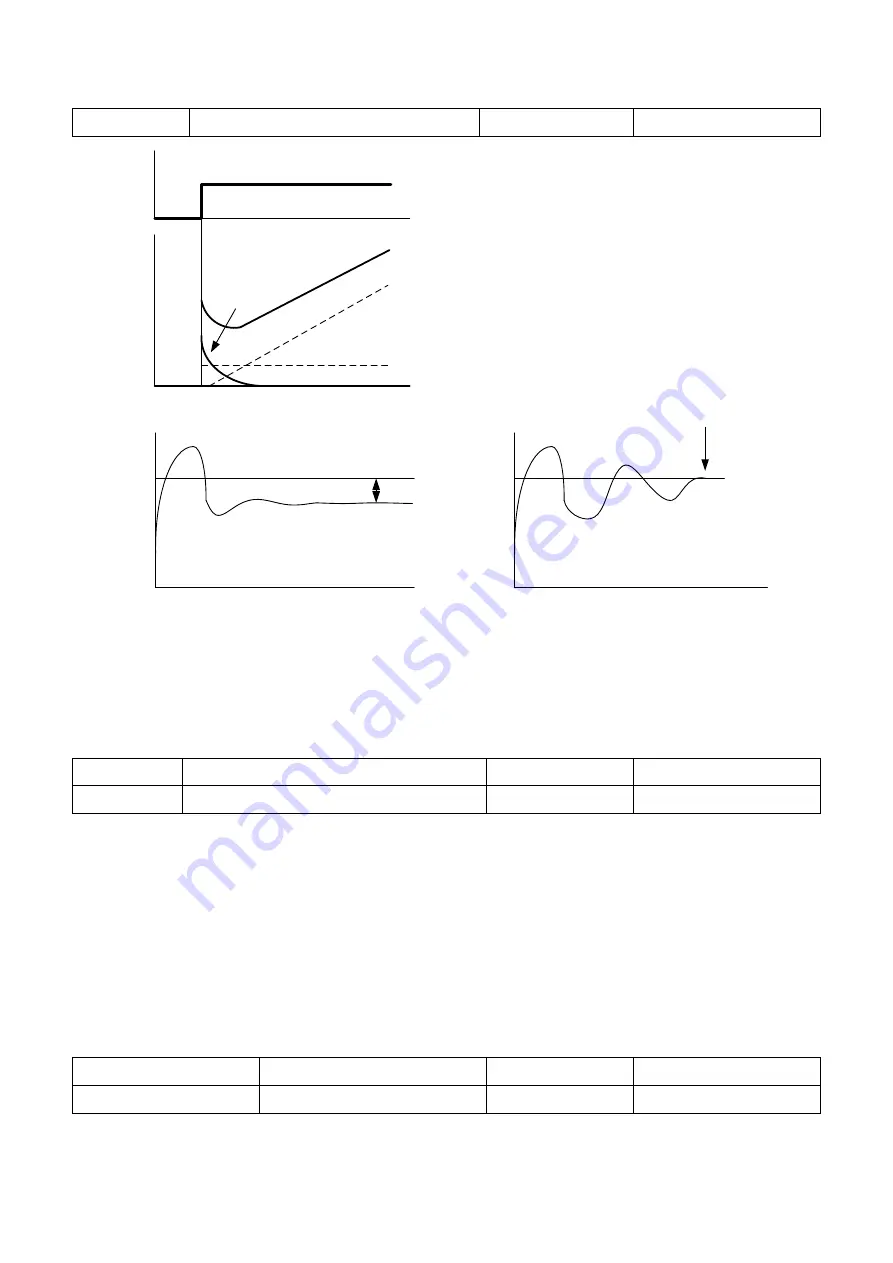
Integral Time Setting (I)
0.0 to 360.0 s
1.0 s
Deviation
Time
PID Input
PID Control
I Control
P Control
Time
D Control
Target
Feedback
Deviation
PID
Feedback
Time
Target
Feedback
PID
Feedback
I Control Eliminates Deviation
Time
Figure 6.18 Relationship between Time and Deviation
b5- 03 Integral Time (I) Limit Setting
Sets the maximum output from the I (integral) control as a percentage of the maximum
frequency (d1-02)
No.
Name
Setting Range
Default
b5-03
Integral Time (I) Limit Setting
0.0 to 100.0%
100.0%
Note: During rapid load fluctuations, PID output may show vibration. Set a limit to suppress the vibration so as to
prevent the equipment damage or motor stall.
b5- 04 Derivative Time (D)
Set this parameter when response improvement is needed.
Sets the time to predict the deviation based on the derivative of the PID input and PID
feedback.. The longer derivative time improves the response but may cause vibration as the
shorter derivative time suppress the overshoot but decrease the response. D control is
disabled when b5-04=0.00.
No.
Name
Setting Range
Default
b5-04
Derivative Time (D)
0.00 to 10.00 s
0.00 s
Summary of Contents for EVO 6800 Series
Page 1: ...MANUAL Compact Vector Drive EVO 6800 Series...
Page 33: ...33 34 2 36 0 2 8 93 0...
Page 35: ...35 4 2 Main Circuit...
Page 41: ...41 4 3 Control Circuit...







































































