





























4. Operation
82 TSα Series User Manual
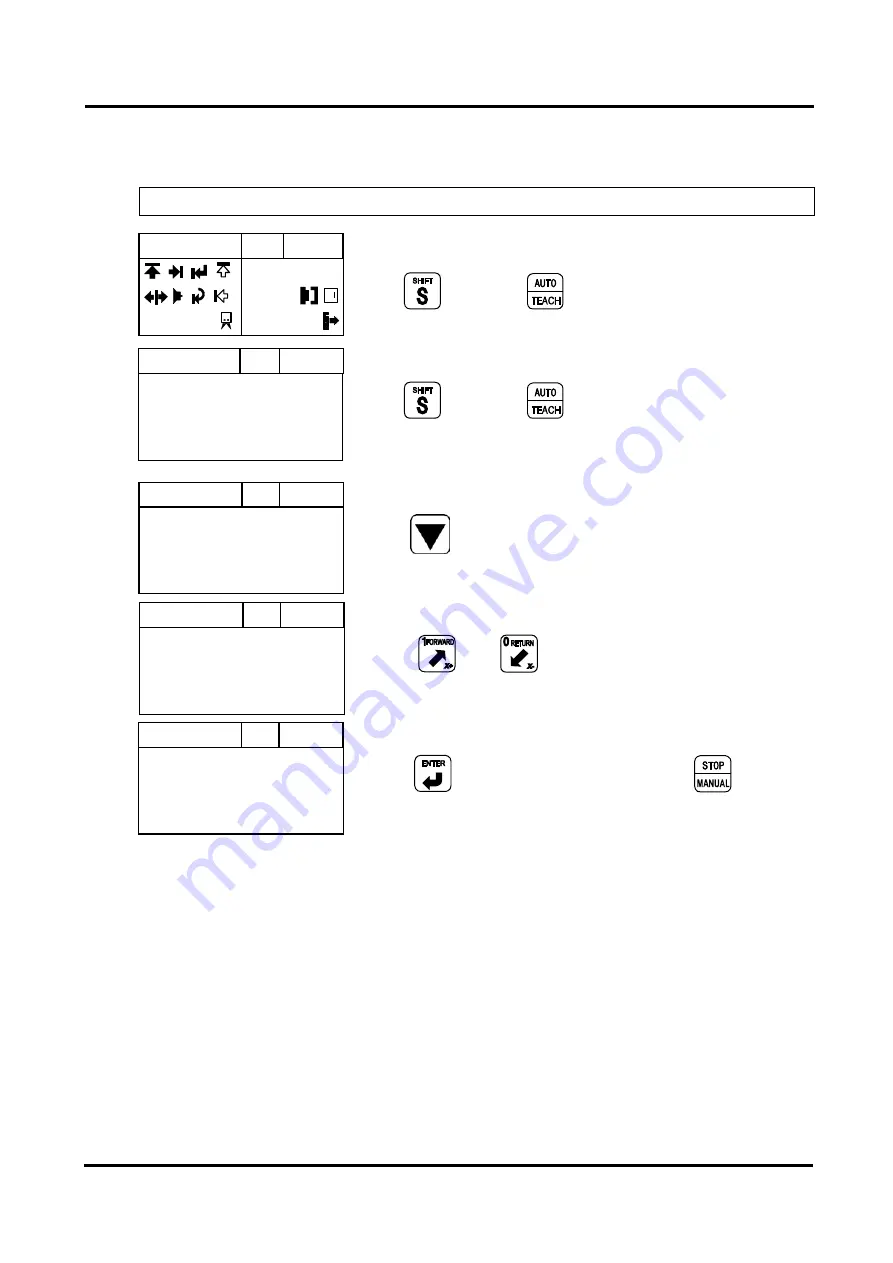
(3) Position setting with Jog Key
Set Reject Position to 100mm.
z
STEP 1
Hold
and press
, move to Mold Number screen.
z
STEP 2
Hold
and press
again, move to Jog Input screen.
z
STEP 3
Press
to select Reject Position.
z
STEP 4
Press
or
move robot to Defective parts
Release( Off ) position.
z
STEP 5
Press
to save position data, press
to move
Manual Mode screen.
P0SubOff ◀30%▶
Set Now
0mm < 0mm
Jog
30
1100
P1RjtOff ◀30%▶
Set Now
1100mm < 1100mm
Jog
30
1100
◀30%▶
Manual
0
30
>P0SubOff
0000mm
P1RjtOff
0000mm
P2NipON
0000mm
Numbmer 30
0000
P1RjtOff ◀30%▶
Set Now
0mm < 0mm
Jog
30
1100
Summary of Contents for TS-200DI
Page 2: ......
Page 14: ...xii...
Page 15: ...xiii...
Page 19: ......
Page 20: ......
Page 21: ...1 Introduction...
Page 22: ......
Page 28: ......
Page 29: ...2 Before Operation...
Page 30: ......
Page 41: ...3 START UP STOP...
Page 42: ......
Page 47: ...4 OPERATION...
Page 48: ......
Page 114: ......
Page 115: ...5 Follow Up...
Page 116: ......
Page 126: ......
Page 127: ...6 Error...
Page 128: ......
Page 134: ......
Page 135: ...Appendix...
Page 136: ......
Page 143: ......





































































