




























1. No terminal output signal is assigned by default. The parameter range is 0000-0014, which is
allocated to other output terminals through parameter P5-40.
2. When the speed of the servo motor is higher than the set value of P5-03, the signal that the servo is
rotating is considered.
2. Related parameters
Parameter
Meaning
Default
value
Unit
Range
Modify
Effective
P5-03
Rotating detection
speed /TGON
50
rpm
0
~
10000
Anytime
At once
If the speed of the servo motor exceeds the set value of P5-03, it is judged that the servo motor is
rotating and the output of the rotation detection (/TGON) signal.
Note: Rotation detection has a hysteresis of 10 rpm.
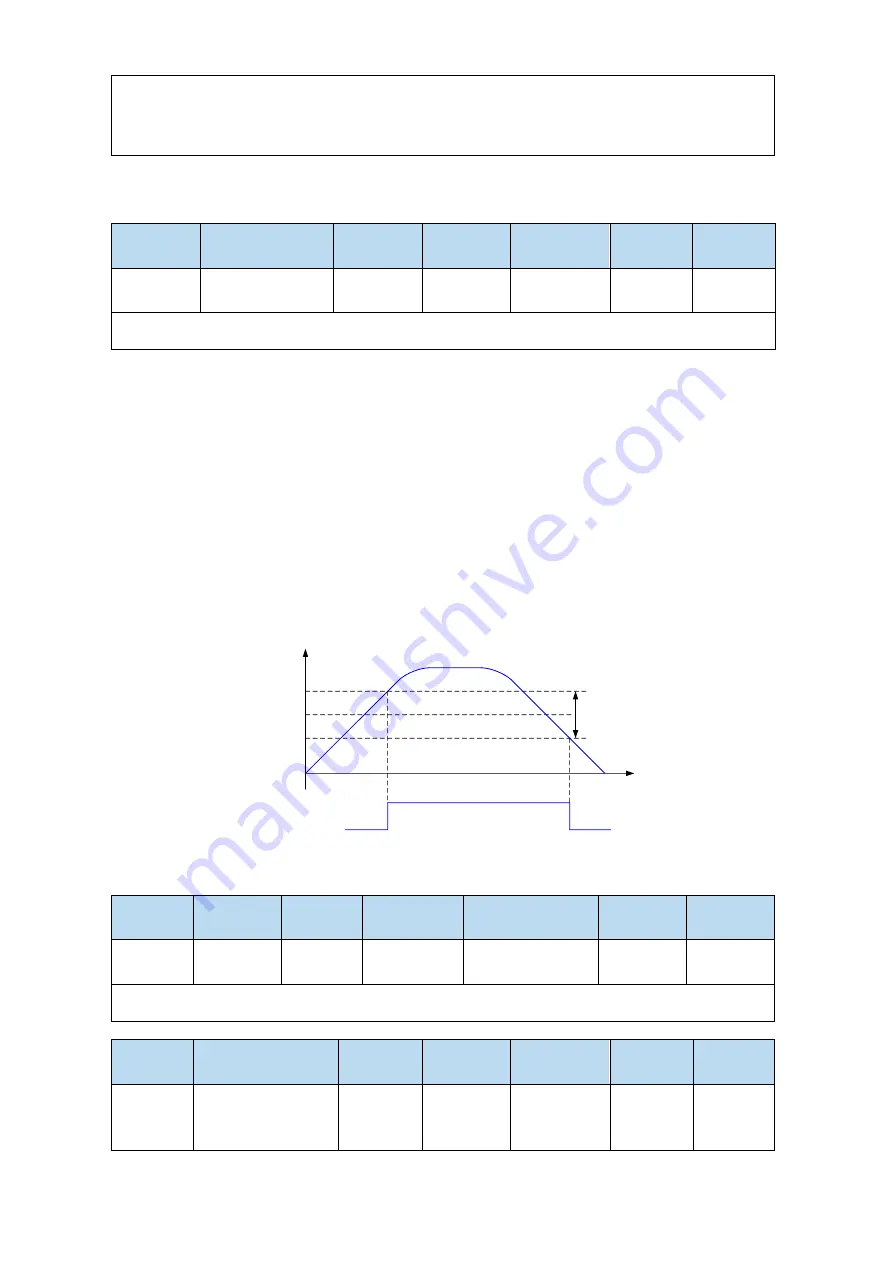
3. Hysteresis
Hysteresis is set up to prevent the system from repeatedly acting and oscillating when the parameters
fluctuate up and down in a certain value. Once the hysteresis value is set, there will be a fixed ring
width. Then only when the parameter must be greater than a certain value can the action be taken.
When the parameter is smaller than another value, the action will be released. The ring width
determines the interval time of the action. The action of small ring width is sensitive and frequent, and
the action of large ring width is slow.
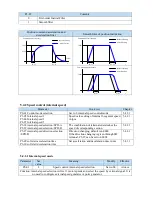
It should be noted that the rotation detection speed (P5-03), the same speed detection speed (P5-04), the
arrival detection speed (P5-05), all contain 10 rpm hysteresis. For example, the rotation detection speed
P5-03 is set to 50, and the rotation detection/TGON output port is SO3.
rpm
/TGON
60rpm
50rpm
40rpm
Ring
width
ON
OFF
OFF
5.7.5.3 Same speed detection (/V-CMP)
Parameter
Signal
Default
setting
Suitable
mode
Meaning
Modify
Effective
P5-39
/V-CMP
n.0000
3, 4, 7
Same speed
detection
Anytime
At once
Defaulted is not distribute to the terminals. Range: 0000-0014. Distribute to output terminal through
P5-39. When it set to 0002, it means output from SO2.
Parameter
Meaning
Default
setting
Unit
Range
Modify
Effective
P5-04
Same speed
detection signal
width
50
rpm
0
~
10000
Anytime
At once
There is default 10rpm hysteresis loop, please refer to chapter 5-12-3 for hysteresis loop.
Содержание DS5L1 Series
Страница 1: ...DS5L1 series servo driver User manual WUXI XINJE ELECTRIC CO LTD Data No SC5 05 20200929 1 0 ...
Страница 2: ......
Страница 6: ......
Страница 33: ...Voltage DC 30V maximum Current SO1 DC 500mA maximum 400W and below servo can support SO others DC 50mA maximum ...
Страница 100: ...3 Set the auto tuning interface 4 Click ok to start inertia identification ...
Страница 106: ...3 set the auto tuning interface ...
Страница 112: ...with higher rigidity 6 Start auto tune 7 Open the servo enable then click ok ...
Страница 169: ...Appendix 9 Torque speed characteristic curve ...
Страница 170: ......







































































