





























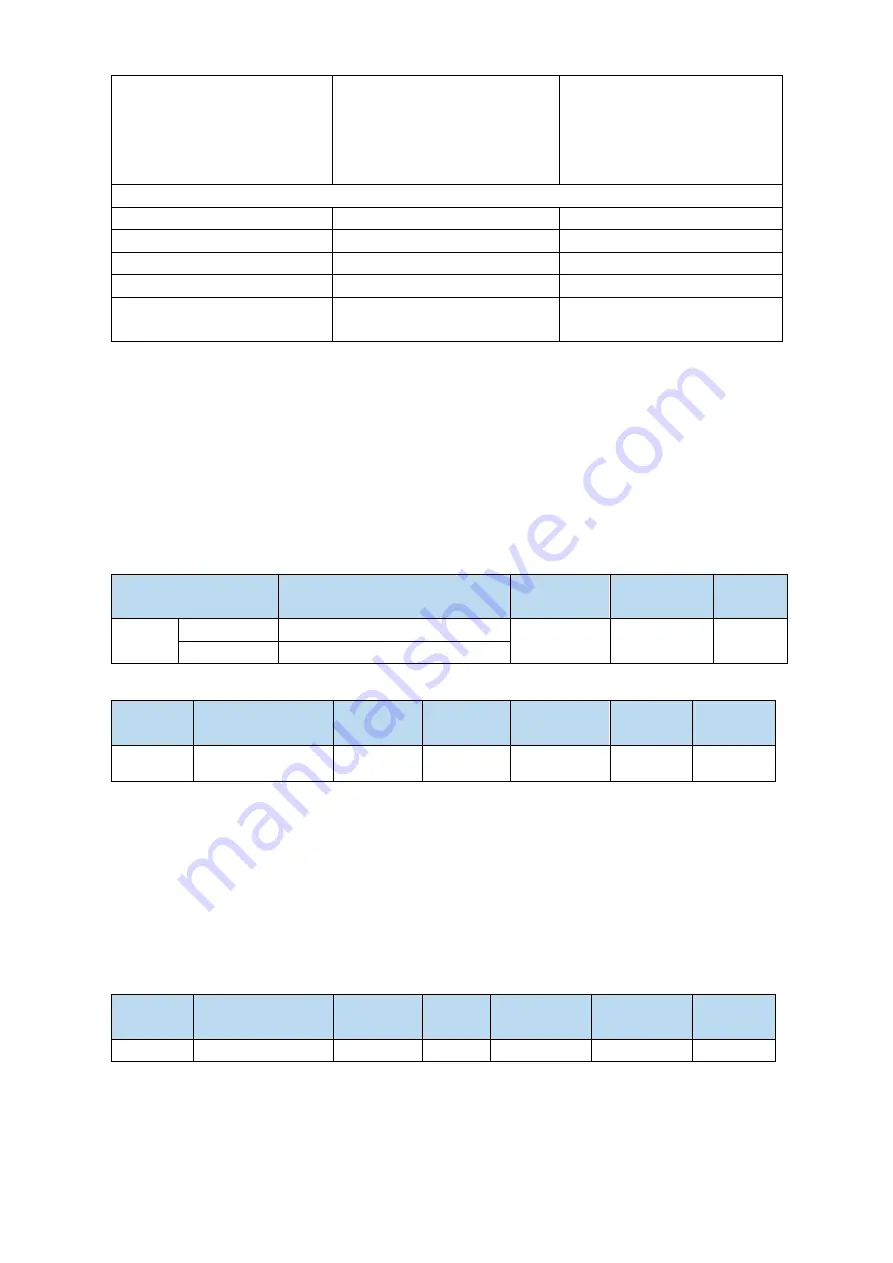
Load inertia ratio P0-07: 500%
speed loop gain P1-00: 200
speed loop gain P1-00: 800
speed loop gain P1-00: 800
speed loop integral P1-01: 3300
speed loop integral P1-01: 825
speed loop integral P1-01: 825
position loop gain P1-02: 200
position loop gain P1-02: 700
position loop gain P1-02: 700
Model loop gain P2-49: 300
Model loop gain P2-49: 300
Model loop gain P2-49: 4000
Phenomenon: Running jitter,
slow response
Phenomenon: smooth operation
and slow response
Phenomenon: smooth operation
and fast response
Note: The above curves only show the effect of the parameters, not the real running curves.
6.1.4 Torque disturbance observation
Disturbance observer can reduce the influence of external disturbance on servo system and improve the
anti-disturbance ability by detecting and estimating the external disturbance torque of the system and
compensating the torque command.
If the soft mode is selected in the auto-tuning mode, the disturbance observer will be closed
automatically, and the gain of the disturbance observer will not change. If the fast positioning or fast
positioning (control overshoot) is selected, the disturbance observer will be opened automatically, and
the gain of the disturbance observer will be modified to 85. The relevant parameters of this function no
need to be set manually by users.
Parameter
Meaning
Default
setting
Modification Effective
P2-00
n.□□□0
Turn-off of disturbance observer
n.□□□0
Servo bb
At once
n.□□□1
Turn-on of disturbance observer
Parameter
Meaning
Default
setting
Unit
Setting
range
Modify
Effective
P2-41
Disturbance
observer gain
85
%
0~100
Anytime
At once
6.2
Rotary inertia presumption
6.2.1 Overview
Rotational inertia estimation is the function of automatic operation (forward and reverse) in the driver
and estimate the load inertia in operation.
Rotational inertia ratio (the ratio of load inertia to motor rotor inertia) is a benchmark parameter for
gain adjustment, and it must be set to the correct value as far as possible.
Parameter
Meaning
Default
setting
Unit
Setting range Modification Effective
P0-07
First inertia ratio
200
%
0~50000
Anytime
At once
Содержание DS5L1 Series
Страница 1: ...DS5L1 series servo driver User manual WUXI XINJE ELECTRIC CO LTD Data No SC5 05 20200929 1 0 ...
Страница 2: ......
Страница 6: ......
Страница 33: ...Voltage DC 30V maximum Current SO1 DC 500mA maximum 400W and below servo can support SO others DC 50mA maximum ...
Страница 100: ...3 Set the auto tuning interface 4 Click ok to start inertia identification ...
Страница 106: ...3 set the auto tuning interface ...
Страница 112: ...with higher rigidity 6 Start auto tune 7 Open the servo enable then click ok ...
Страница 169: ...Appendix 9 Torque speed characteristic curve ...
Страница 170: ......







































































