





























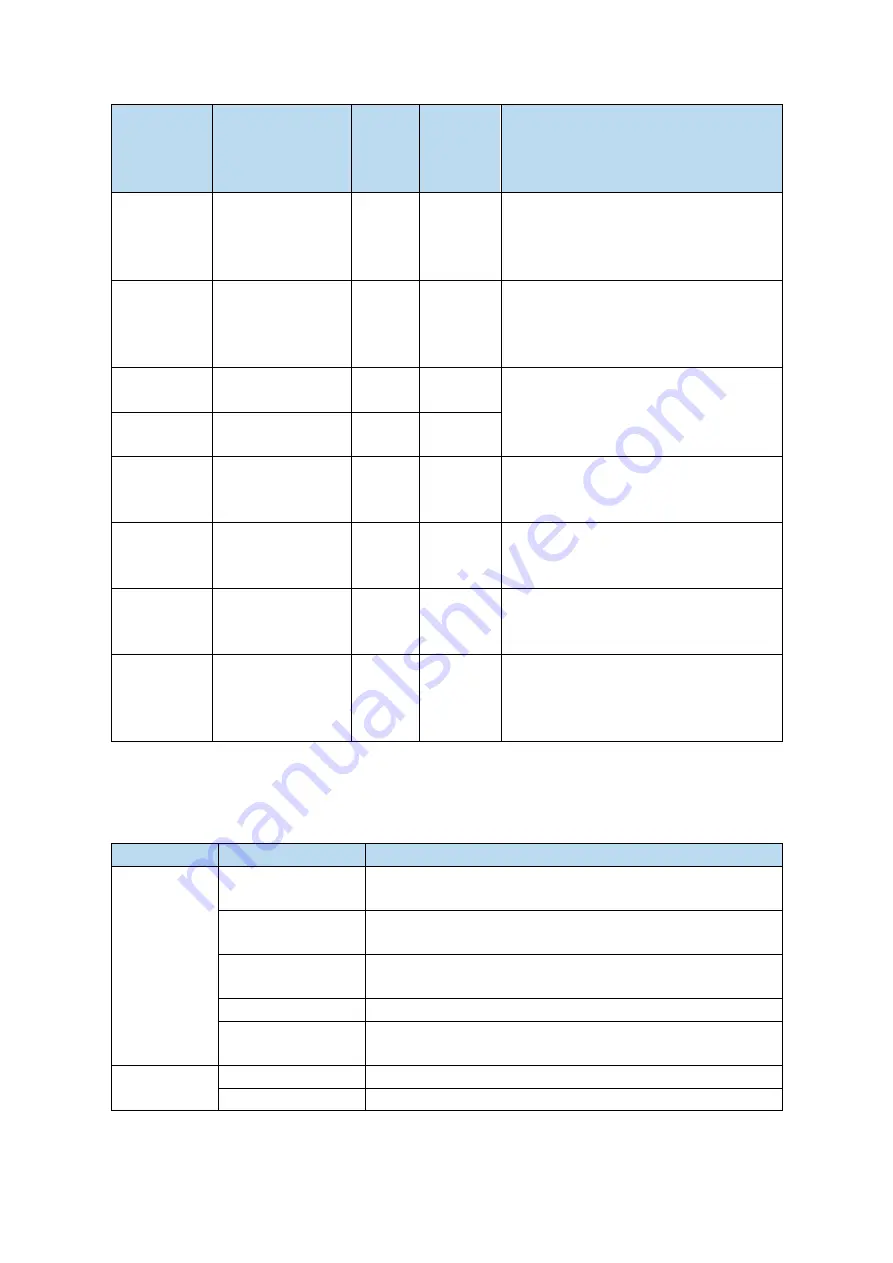
6.6.6 Adaptive parameters effect
Parameter
Small
inertia/large
inertia
Name
Default
value
Range
Effect
P2-05/P6-05
Adaptive
speed
loop gain
400/200 200-400
Reduction can improve the inertia
capability, but it will reduce the
responsiveness, which has a greater
impact on the responsiveness.
P2-07/P6-07
Adaptive
load
inertia ratio
0/50
0-200
Increase can greatly improve the inertia
capacity without affecting the
responsiveness. Too large will produce
vibration.
P2-08/P6-08
Speed
observer
gain
60/40
30-60
Reducing P2-08 and increasing P2-12 can
greatly improve the inertia capability, but
it will reduce the responsiveness, which
has a great impact on responsiveness.
P2-12/P6-12
Adaptive
stable
max inertia ratio
30/50
30-60
P2-10
Adaptive
speed
loop integral time
coefficient
500
200-larger
Adjust according to need, generally
increase
P2-11
Adaptive position
loop
gain
coefficient
100
50-200
Adjust according to the need, increasing
will make the response fast, reducing will
make the response slow
P2-16
Adaptive
motor
rotor
inertia
coefficient
100
100-200
Increasing will improve the servo rigidity
and enhance anti-disturbance ability, can
solve operation jitter.
P2-19
Adaptive
bandwidth
50~70
40-80
Increasing will improve the inertia
capacity slightly, and has little effect on
the responsiveness, to be an auxiliary
parameter.
6.6.7 Invalid parameters when adaptive effective
When the adaptive function is effective (P2-01.0=1), the invalid parameters are shown as below:
Item
Parameters
Descriptions
Gain
P1-00
P1-05
First speed loop gain
Second speed loop gain
P1-01
P1-06
First speed loop integral time constant
Second speed loop integral time constant
P1-02
P1-07
First position loop gain
Second position loop gain
P2-49
Model loop gain
P0-07
P0-08
First inertia ratio
Second inertia ratio
Switch
P5-33
/G-SEL gain switch
P5-36
/I-SEL inertia ratio switch
Содержание DS5L1 Series
Страница 1: ...DS5L1 series servo driver User manual WUXI XINJE ELECTRIC CO LTD Data No SC5 05 20200929 1 0 ...
Страница 2: ......
Страница 6: ......
Страница 33: ...Voltage DC 30V maximum Current SO1 DC 500mA maximum 400W and below servo can support SO others DC 50mA maximum ...
Страница 100: ...3 Set the auto tuning interface 4 Click ok to start inertia identification ...
Страница 106: ...3 set the auto tuning interface ...
Страница 112: ...with higher rigidity 6 Start auto tune 7 Open the servo enable then click ok ...
Страница 169: ...Appendix 9 Torque speed characteristic curve ...
Страница 170: ......







































































