





























1. Select and hold on any route leg (the line drawn between the each of
the route’s waypoints).
2. Select
[Follow Route]
from the context menu.
You can also select one of the route’s waypoints and select [more
options] and then [Follow route].
Note:
If you select the first waypoint in a route then the next step is skipped and
active navigation commences immediately.
3. Select the desired follow option from the Follow route notification:
• Select
[From Start]
to commence active navigation from the first
waypoint in the route.
• Select
[From next waypoint]
to commence active navigation from the
next waypoint after the selected route leg.
• Select
[From this waypoint]
to commence active navigation from the
selected waypoint.
Note:
• The
[Reverse route direction]
option allows you to permanently reverse
the route (i.e.: switch the start and end waypoint) so that the route can
be followed in the opposite direction. To reverse the route select the
check box and then choose either the desired options to commence
active navigation.
• If the selected waypoint is part of more than 1 route then the Route list
will be displayed so that you can choose which route you want to follow.
4. If required, engage the mechanical drive by either engaging the wheel
drive’s clutch or attaching the pushrod onto the tiller pin.
5. Select the
[Pilot]
icon located at the top of the screen.
6. Select
[Steer to Nav]
from the Pilot sidebar.
7. Select
[Engage pilot]
.
Your vessel will turn and navigate to the indicated waypoint.
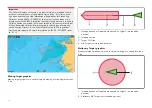
8. The waypoint arrival alarm will trigger when your vessel reaches the
Waypoint arrival radius (pilot in track mode) and a countdown will
commence.
If the [Waypoint arrival] alarm is disabled then the Auto turn toast
notification is displayed instead of the Auto turn waypoint arrival
notification.
The waypoint [Arrival radius (pilot in track mode)] can be set from the
Alarms manager: [Homescreen > Alarms > Settings > Arrival radius (pilot
in track mode)]. The [Arrival radius (pilot in track mode)] overrides the
standard [Arrival radius] notification.
Important:
When the auto turn countdown reaches zero your vessel will automatically
turn towards the next waypoint. NO user action or confirmation is required.
9. Repeat step 8 until the last waypoint in the route is reached.
10. Select
[Disengage pilot]
from the notification.
174
Содержание LIGHTHOUSE 4
Страница 2: ......
Страница 4: ......
Страница 20: ...APPENDIX C HARDWARE AND SOFTWARE COMPATIBILITY 478 APPENDIX D DOCUMENT CHANGE HISTORY 480 20...
Страница 414: ...414...
Страница 451: ...4 Select Delete again to confirm 5 Select OK YachtSense ecosystem 451...
Страница 484: ......
Страница 503: ......







































































