



















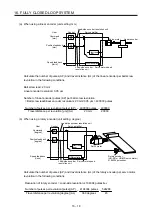






16. FULLY CLOSED LOOP SYSTEM
16 - 8
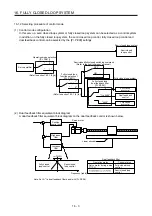
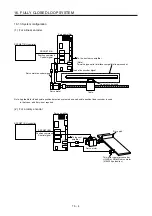
(2) Selection of fully closed loop system
By setting [Pr. PA01], [Pr. PE01] and the control command of controller, the control method can be
selected as shown in the following table.
[Pr. PA01]
[Pr. PE01]
Semi closed loop control/
fully closed loop control
switching signal
Command unit
Control System
Absolute position
detection system
"_ _ 0 _"
Semi closed
loop system
(standard
control mode)
Servo motor
encoder unit
Semi closed loop control
"_ _ 1 _ "
Fully closed
loop system
(fully closed
loop control
mode)
"_ _ _ 0"
Load-side encoder
unit
Dual feedback
control (fully closed loop
control)
(Note)
"_ _ _ 1"
Off
Semi closed loop control
×
On
Dual feedback
control (fully closed loop
control)
×
Note. Applicable when the load-side encoder is set as the absolute position encoder.
(a) Operation mode selection
Select a operation mode.
Operation mode selection
[Pr. PA01]
1 0
0
Semi closed loop system
(Standard control mode)
Fully closed loop system
(Fully closed loop control mode)
Load-side encoder
resolution unit
Set value
0
1
Operation mode
Servo motor-side
resolution unit
Control unit
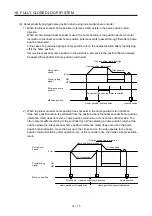
(b) Semi closed loop control/fully closed loop control selection
Select the semi closed loop control/fully closed loop control.
Fully closed loop control selection
0: Always enabled
1: Switching using the control command of controller
(switching between semi closed/fully closed)
0
0
Selection using the control
command of controller
OFF
ON
Semi closed loop control
Fully closed loop control
Control method
When the operation mode selection in [Pr. PA01] is set to "_ _ 1 _"
(fully closed loop system), this setting is enabled.
0
[Pr. PE01]
Содержание MR-J4W2
Страница 9: ...A 8 MEMO ...
Страница 17: ...8 MEMO ...
Страница 31: ...1 FUNCTIONS AND CONFIGURATION 1 14 MEMO ...
Страница 95: ...4 STARTUP 4 20 MEMO ...
Страница 169: ...6 NORMAL GAIN ADJUSTMENT 6 20 MEMO ...
Страница 201: ...7 SPECIAL ADJUSTMENT FUNCTIONS 7 32 MEMO ...
Страница 213: ...8 TROUBLESHOOTING 8 12 MEMO ...
Страница 219: ...9 OUTLINE DRAWINGS 9 6 MEMO ...
Страница 229: ...10 CHARACTERISTICS 10 10 MEMO ...
Страница 295: ...13 USING STO FUNCTION 13 14 MEMO ...
Страница 327: ...14 USING A LINEAR SERVO MOTOR 14 32 MEMO ...
Страница 371: ...16 FULLY CLOSED LOOP SYSTEM 16 24 MEMO ...
Страница 521: ...APPENDIX App 38 ...
Страница 537: ...MEMO ...
Страница 541: ......







































































