


























16. FULLY CLOSED LOOP SYSTEM
16 - 2
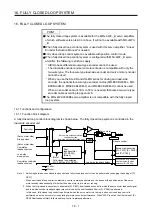
The following table shows the functions of each control mode.
Control Description
Semi closed loop control
Feature
Position is controlled according to the servo motor-side data.
Advantage
Since this control is insusceptible to machine influence (such as machine resonance),
the gains of the servo amplifier can be raised and the settling time shortened.
Disadvantage
If the servo motor side is at a stop, the side may be vibrating or the load-side accuracy
not obtained.
Dual feedback control
Feature
Position is controlled according to the servo motor-side data and load-side data.
Advantage
Control is performed according to the servo motor-side data during operation, and
according to the load side-data at a stop in sequence to raise the gains during
operation and shorten the settling time. A stop is made with the load-side accuracy.
Fully closed loop control
Feature
Position is controlled according to the load-side data.
Advantage
The load-side accuracy is obtained not only at a stop but also during operation.
Disadvantage
Since this control is susceptible to machine resonance or other influences, the gains
of the servo amplifier may not rise.
Содержание MR-J4W2
Страница 9: ...A 8 MEMO ...
Страница 17: ...8 MEMO ...
Страница 31: ...1 FUNCTIONS AND CONFIGURATION 1 14 MEMO ...
Страница 95: ...4 STARTUP 4 20 MEMO ...
Страница 169: ...6 NORMAL GAIN ADJUSTMENT 6 20 MEMO ...
Страница 201: ...7 SPECIAL ADJUSTMENT FUNCTIONS 7 32 MEMO ...
Страница 213: ...8 TROUBLESHOOTING 8 12 MEMO ...
Страница 219: ...9 OUTLINE DRAWINGS 9 6 MEMO ...
Страница 229: ...10 CHARACTERISTICS 10 10 MEMO ...
Страница 295: ...13 USING STO FUNCTION 13 14 MEMO ...
Страница 327: ...14 USING A LINEAR SERVO MOTOR 14 32 MEMO ...
Страница 371: ...16 FULLY CLOSED LOOP SYSTEM 16 24 MEMO ...
Страница 521: ...APPENDIX App 38 ...
Страница 537: ...MEMO ...
Страница 541: ......







































































