



























15. USING A DIRECT DRIVE MOTOR
15 - 11
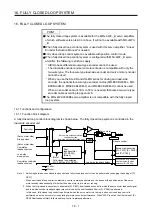
2) Direct drive motor movement (when FLS and RLS are on)
Magnetic pole detection completion position
Servo-on position (Magnetic pole detection start position)
Center of the direct drive motor rotation part
FLS (Note)
(Note) RLS
10 degrees or less
Note. When the stroke limit (FLS or RLS) turns off during the magnetic pole detection, the
magnetic pole detection is carried on to the opposite direction. When FLS and RLS
are off, [AL. 27 Initial magnetic pole detection error] occurs.
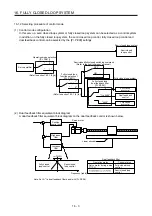
3) Direct drive motor movement (when FLS or RLS is off)
When FLS or RLS is off at servo-on, the magnetic pole detection is carried out as follows.
Magnetic pole detection completion position
Magnetic pole detection
start position
After the motor moves to the position where the stroke limit
(FLS or RLS) is set, the magnetic pole detection starts.
Servo-on position
Center of the direct drive motor rotation part
FLS
RLS
10 degrees or less
(b) Absolute position detection system
POINT
When the absolute position detection system is used, the magnetic pole
detection is required when the power is turned on with the following timing.
When the system is set up (at the first startup of equipment)
When the Z-phase pulse of the direct drive motor is not turned on at the
system setup (When the Z-phase pulse of the direct drive motor can be turned
on manually, the magnetic pole detection is not required.)
After a direct drive motor is replaced
When [AL. 25 Absolute position erased] has occurred
Turn on the Z-phase pulse of the direct drive motor in JOG operation from the
controller after the magnetic pole detection.
Perform the magnetic pole detection in the following procedure.
1) Set [Pr. PL01 Linear servo motor/DD motor function selection 1] to "_ _ _ 1" (Magnetic pole
detection at first servo-on).
[Pr. PL01]
Magnetic pole detection at first servo-on (initial value)
1
Содержание MR-J4W2
Страница 9: ...A 8 MEMO ...
Страница 17: ...8 MEMO ...
Страница 31: ...1 FUNCTIONS AND CONFIGURATION 1 14 MEMO ...
Страница 95: ...4 STARTUP 4 20 MEMO ...
Страница 169: ...6 NORMAL GAIN ADJUSTMENT 6 20 MEMO ...
Страница 201: ...7 SPECIAL ADJUSTMENT FUNCTIONS 7 32 MEMO ...
Страница 213: ...8 TROUBLESHOOTING 8 12 MEMO ...
Страница 219: ...9 OUTLINE DRAWINGS 9 6 MEMO ...
Страница 229: ...10 CHARACTERISTICS 10 10 MEMO ...
Страница 295: ...13 USING STO FUNCTION 13 14 MEMO ...
Страница 327: ...14 USING A LINEAR SERVO MOTOR 14 32 MEMO ...
Страница 371: ...16 FULLY CLOSED LOOP SYSTEM 16 24 MEMO ...
Страница 521: ...APPENDIX App 38 ...
Страница 537: ...MEMO ...
Страница 541: ......







































































