



























15. USING A DIRECT DRIVE MOTOR
15 - 19
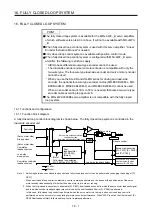
15.4.3 Dynamic brake characteristics
POINT
Do not use dynamic brake to stop in a normal operation as it is the function to
stop in emergency.
For a machine operating at the recommended load to motor inertia ratio or less,
the estimated number of usage times of the dynamic brake is 1000 times while
the machine decelerates from the rated speed to a stop once in 10 minutes.
Be sure to enable EM1 (Forced stop 1) after the direct drive motor stops when
using EM1 (Forced stop 1) frequently in other than emergency.
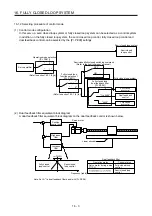
(1) Dynamic brake operation
(a) Calculation of coasting distance
Fig. 15.3 shows the pattern in which the servo motor comes to a stop when the dynamic brake is
operated. Use equation 15.1 to calculate an approximate coasting distance to a stop. The dynamic
brake time constant
τ
varies with the direct drive motor and machine operation speeds. (Refer to (1)
(b) of this section.)
Dynamic brake
time constant
Time
t
e
V
0
ON
OFF
EM1 (Forced stop 1)
Machine
speed
Fig. 15.3 Dynamic brake operation diagram
L
max
=
60
V
0
•
J
M
t
e
1 + J
L
······················································································ (15.1)
L
max
: Maximum coasting distance ................................................................................................... [mm]
V
0
: Machine's fast feed speed ................................................................................................. [mm/min]
J
M
: Moment of inertia of direct drive motor ....................................................................... [× 10
-4
kg•m
2
]
J
L
: Load moment of inertia converted into equivalent value on direct drive motor rotor .. [× 10
-4
kg•m
2
]
τ
: Dynamic brake time constant .......................................................................................................... [s]
t
e
: Delay time of control section .......................................................................................................... [s]
There is internal relay delay time of about 10 ms
Содержание MR-J4W2
Страница 9: ...A 8 MEMO ...
Страница 17: ...8 MEMO ...
Страница 31: ...1 FUNCTIONS AND CONFIGURATION 1 14 MEMO ...
Страница 95: ...4 STARTUP 4 20 MEMO ...
Страница 169: ...6 NORMAL GAIN ADJUSTMENT 6 20 MEMO ...
Страница 201: ...7 SPECIAL ADJUSTMENT FUNCTIONS 7 32 MEMO ...
Страница 213: ...8 TROUBLESHOOTING 8 12 MEMO ...
Страница 219: ...9 OUTLINE DRAWINGS 9 6 MEMO ...
Страница 229: ...10 CHARACTERISTICS 10 10 MEMO ...
Страница 295: ...13 USING STO FUNCTION 13 14 MEMO ...
Страница 327: ...14 USING A LINEAR SERVO MOTOR 14 32 MEMO ...
Страница 371: ...16 FULLY CLOSED LOOP SYSTEM 16 24 MEMO ...
Страница 521: ...APPENDIX App 38 ...
Страница 537: ...MEMO ...
Страница 541: ......







































































