





























15. USING A DIRECT DRIVE MOTOR
15 - 1
15. USING A DIRECT DRIVE MOTOR
CAUTION
When using the direct drive motor, read the "Direct Drive Motor Instruction
Manual".
POINT
The number of connectable direct drive motors is limited for one MR-BT6VCASE
battery case. Refer to section 11.3 for details.
The MR-J4W2-0303B6 servo amplifier is not compatible with direct drive motor.
15.1 Functions and configuration
15.1.1 Summary
The fields of semiconductor/LCD manufacturing systems, mounters, and others have strong demands for
high accuracy and efficiency. Therefore, the number of systems using a direct drive motor for a drive axis
has been increasing. The direct drive servo system includes the following features.
(1) Performance
(a) The direct drive servo system ensures the high-rigidity and the high-torque. A high-resolution
encoder enables the high-accuracy control.
(b) The high-resolution encoder contributes to the high-indexer accuracy.
(c) Since reducer is no longer required, no backlash occurs. In addition, the settling time is reduced, and
the high-frequency operation is enabled.
(d) Since reducer is no longer required, the motor does not deteriorate with time by reducer.
(2) Mechanism
(a) The motor's low profile design contributes to compact moving part of the machine and a low center
of gravity for enhanced equipment stability.
(b) The motor has an inner rotor with hollow shaft which enables cables and pipes to be passed
through.
(c) Lubrication and the maintenance due to abrasion are not required.
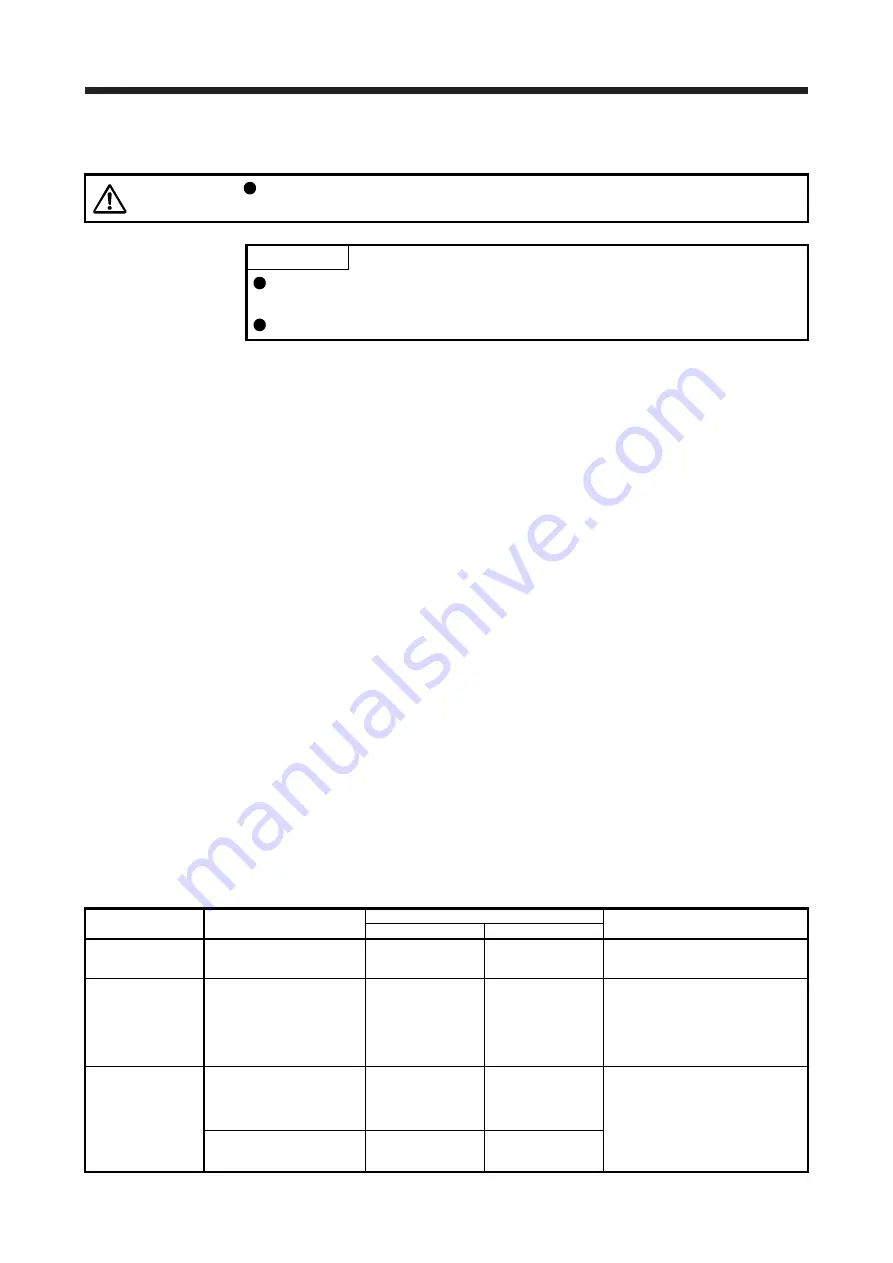
The following shows the differences between the direct drive motor and the rotary servo motor.
Category Item
Differences
Remark
Direct drive motor
Rotary servo motor
External I/O signal
FLS (Upper stroke limit),
RLS (Lower stroke limit)
Required (for
magnetic pole
detection)
Not required
Automatically turns on in the
parameter setting.
Motor pole
adjustment
Magnetic pole detection
Required
Not required
(default setting)
Automatically executed at the first
servo-on after the power is turned
on.
For the absolute position detection
system, [Pr. PL01] can disable the
magnetic pole detection. (Refer to
(3) (b) of 15.3.2.)
Absolute position
detection system
Absolute position encoder
battery
1 battery case (MR-
BT6VCASE) and 5 batteries
(MR-BAT6V1)
Required
Required
The number of connectable direct
drive motors is limited. Refer to
section 11.3 for details.
Absolute position storage
unit
(MR-BTAS01)
Required
Not required
Содержание MR-J4W2
Страница 9: ...A 8 MEMO ...
Страница 17: ...8 MEMO ...
Страница 31: ...1 FUNCTIONS AND CONFIGURATION 1 14 MEMO ...
Страница 95: ...4 STARTUP 4 20 MEMO ...
Страница 169: ...6 NORMAL GAIN ADJUSTMENT 6 20 MEMO ...
Страница 201: ...7 SPECIAL ADJUSTMENT FUNCTIONS 7 32 MEMO ...
Страница 213: ...8 TROUBLESHOOTING 8 12 MEMO ...
Страница 219: ...9 OUTLINE DRAWINGS 9 6 MEMO ...
Страница 229: ...10 CHARACTERISTICS 10 10 MEMO ...
Страница 295: ...13 USING STO FUNCTION 13 14 MEMO ...
Страница 327: ...14 USING A LINEAR SERVO MOTOR 14 32 MEMO ...
Страница 371: ...16 FULLY CLOSED LOOP SYSTEM 16 24 MEMO ...
Страница 521: ...APPENDIX App 38 ...
Страница 537: ...MEMO ...
Страница 541: ......







































































