





























5 PARAMETERS
5.2 Detailed list of parameters
213
5
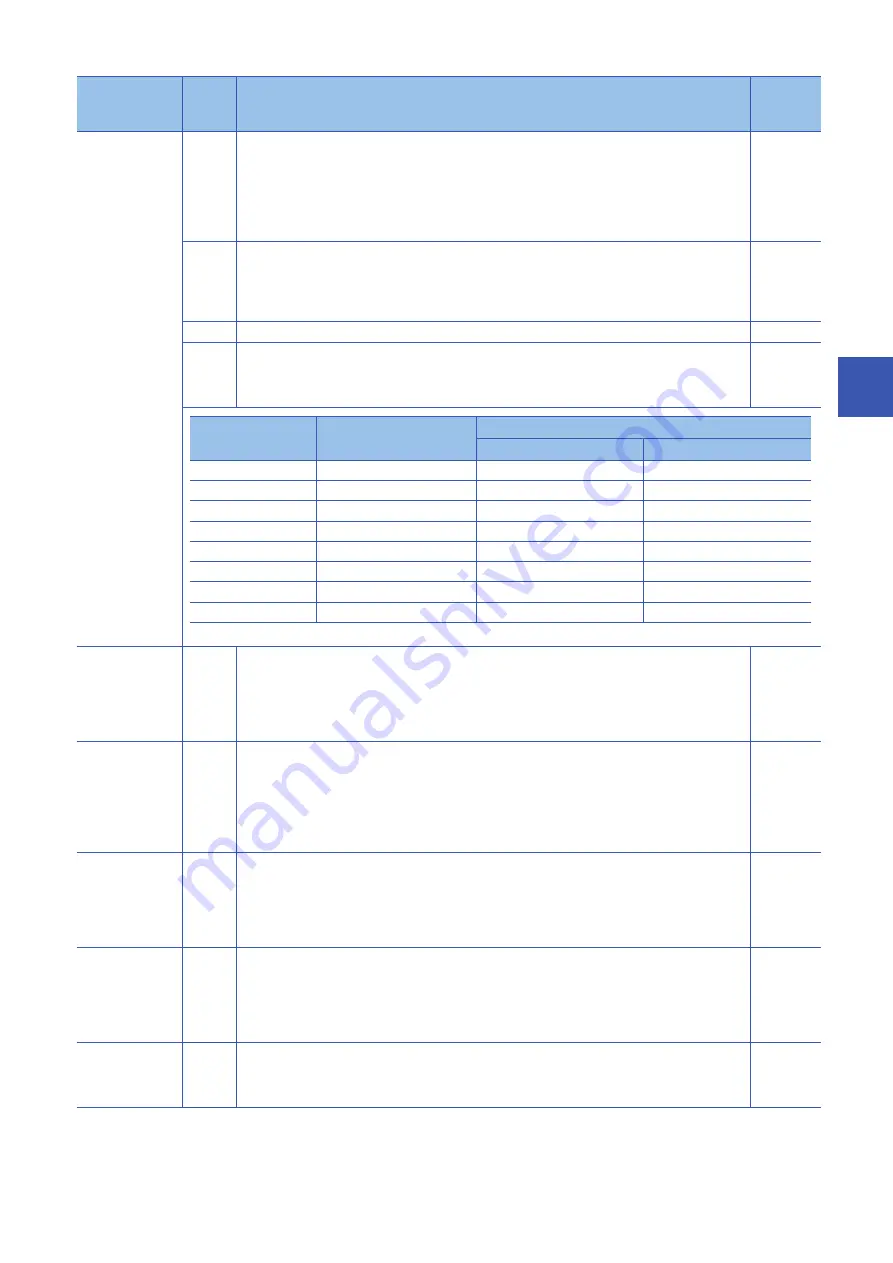
PE03
*FCT2
Fully closed loop
function selection 2
_ _ _ x
Fully closed loop control error detection function selection
0: Disabled
1: Speed deviation error detection
2: Position deviation error detection
3: Speed deviation error/position deviation error detection
Refer to the following table for settings.
The setting of this digit is used by servo amplifier with software version A1 or later.
3h
_ _ x _
Position deviation error detection system selection
0: Continuous detection system
1: Detection system at stop (detected with command set to "0")
Refer to the following table for settings.
The setting of this digit is used by servo amplifier with software version A1 or later.
0h
_ x _ _
For manufacturer setting
0h
x _ _ _
Fully closed loop control error reset selection
0: Reset disabled (reset by powering off/on enabled)
1: Reset enabled
The setting of this digit is used by servo amplifier with software version A1 or later.
0h
PE04
**FBN
Fully closed loop
control - Feedback
pulse electronic
gear 1 - Numerator
Set a numerator of electronic gear for the servo motor encoder pulse at the fully closed loop control.
Set the electronic gear so that the number of servo motor encoder pulses for one servo motor revolution is
converted to the resolution of the load-side encoder.
This parameter is supported with software version A1 or later.
Setting range: 1 to 65535
1
PE05
**FBD
Fully closed loop
control - Feedback
pulse electronic
gear 1 -
Denominator
Set a denominator of electronic gear for the servo motor encoder pulse at the fully closed loop control.
Set the electronic gear so that the number of servo motor encoder pulses for one servo motor revolution is
converted to the resolution of the load-side encoder.
This parameter is supported with software version A1 or later.
Setting range: 1 to 65535
1
PE06
BC1
Fully closed loop
control - Speed
deviation error
detection level
Set [AL. 42.9 Fully closed loop control error by speed deviation] of the fully closed loop control error
detection. When the speed deviation between the servo motor encoder and load-side encoder becomes
larger than the setting value, the alarm will occur.
This parameter is supported with software version A1 or later.
Setting range: 1 to 50000
400 [r/min]
PE07
BC2
Fully closed loop
control - Position
deviation error
detection level
Set [AL. 42.8 Fully closed loop control error by position deviation] of the fully closed loop control error
detection. When the position deviation between the servo motor encoder and load-side encoder becomes
larger than the setting value, the alarm will occur.
This parameter is supported with software version A1 or later.
Setting range: 1 to 20000
100 [kpulse]
PE08
DUF
Fully closed loop
dual feedback filter
Set a dual feedback filter band.
Page 527 Setting of fully closed loop dual feedback filter
This parameter is supported with software version A1 or later.
Setting range: 1 to 4500
10 [rad/s]
No./symbol/
name
Setting
digit
Function
Initial
value
[unit]
Setting value
Speed deviation error
Position deviation error
With command
0 command
_ _ 0 0
_ _ 0 1
_ _ 0 2
_ _ 0 3
_ _ 1 0
_ _ 1 1
_ _ 1 2
_ _ 1 3
: Abnormal detection enabled
: Abnormal detection disabled
Содержание MELSERVO-J4 series
Страница 2: ......
Страница 605: ...APPX Appendix 6 EC declaration of conformity 603 A ...
Страница 638: ...636 APPX Appendix 14 Encoder output pulse setting method MEMO ...
Страница 645: ......







































































