





























5 PARAMETERS
5.2 Detailed list of parameters
185
5
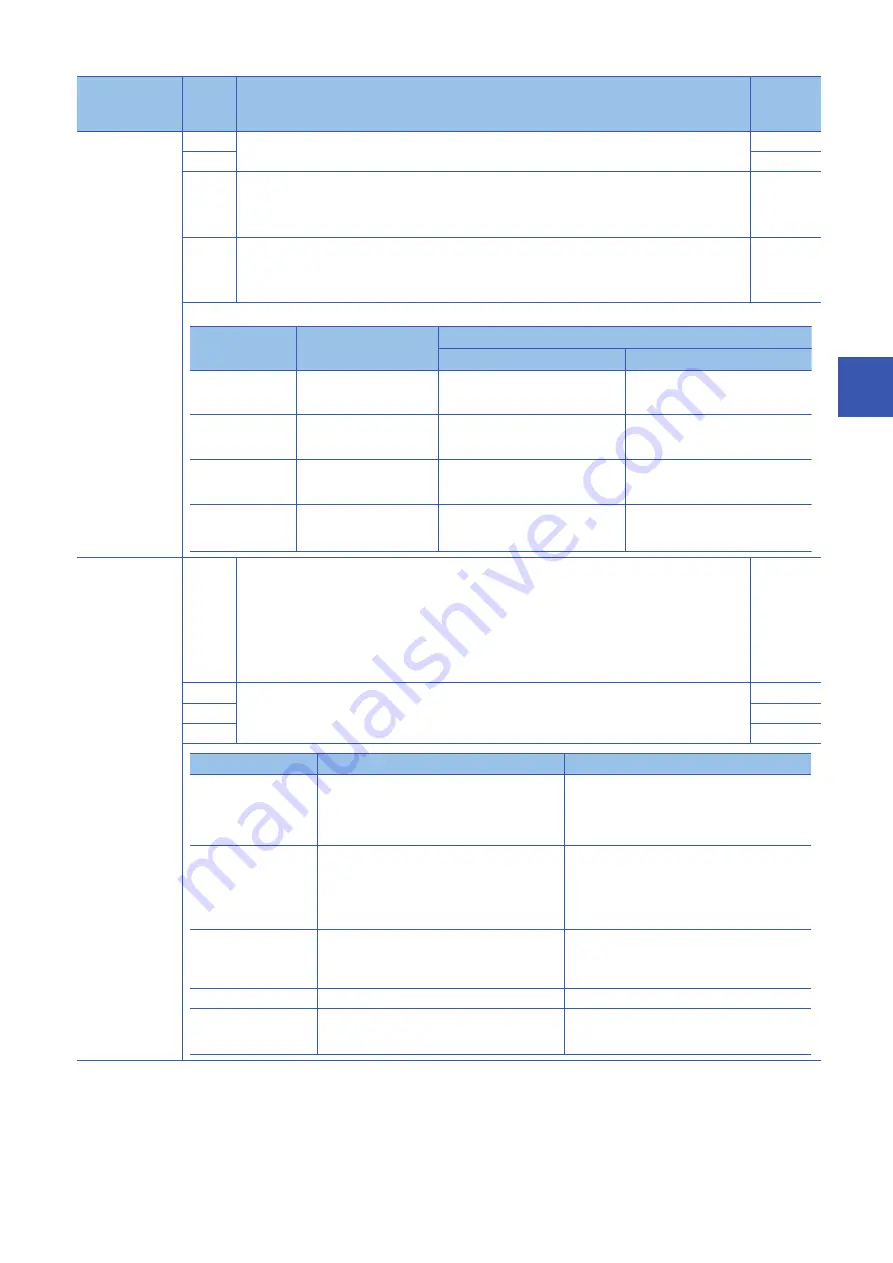
PA04
*AOP1
Function selection
A-1
_ _ _ x
For manufacturer setting
0h
_ _ x _
0h
_ x _ _
Servo forced stop selection
0: Enabled (The forced stop input EM2 or EM1 is used.)
1: Disabled (The forced stop input EM2 and EM1 are not used.)
Refer to the following table for details.
0h
x _ _ _
Forced stop deceleration function selection
0: Forced stop deceleration function disabled (EM1)
2: Forced stop deceleration function enabled (EM2)
Refer to the following table for details.
2h
Deceleration method
PA08
ATU
Auto tuning mode
_ _ _ x
Gain adjustment mode selection
Select the gain adjustment mode.
0: 2 gain adjustment mode 1 (interpolation mode)
1: Auto tuning mode 1
2: Auto tuning mode 2
3: Manual mode
4: 2 gain adjustment mode 2
Refer to the following table for details.
1h
_ _ x _
For manufacturer setting
0h
_ x _ _
0h
x _ _ _
0h
No./symbol/
name
Setting
digit
Function
Initial
value
[unit]
Setting value
EM2/EM1
Deceleration method
EM2 or EM1 is off
Alarm occurred
EM1
MBR (Electromagnetic brake
interlock) turns off after the forced
stop deceleration.
MBR (Electromagnetic brake
interlock) turns off after the forced
stop deceleration.
EM2
2 0 _ _
0 0 _ _
MBR (Electromagnetic brake
interlock) turns off without the forced
stop deceleration.
MBR (Electromagnetic brake
interlock) turns off without the forced
stop deceleration.
Neither is used.
MBR (Electromagnetic brake
interlock) turns off after the forced
stop deceleration.
Neither is used.
2 1 _ _
0 1 _ _
MBR (Electromagnetic brake
interlock) turns off without the forced
stop deceleration.
Setting value
Gain adjustment mode
Automatically adjusted parameter
2 gain adjustment mode 1 (interpolation mode)
_ _ _ 0
_ _ _ 1
_ _ _ 2
Auto tuning mode 1
Auto tuning mode 2
[Pr. PB07 Model loop gain]
[Pr. PB08 Position loop gain]
[Pr. PB09 Speed loop gain]
[Pr. PB10 Speed integral compensation]
[Pr. PB08 Position loop gain]
[Pr. PB09 Speed loop gain]
[Pr. PB10 Speed integral compensation]
_ _ _ 3
_ _ _ 4
Manual mode
2 gain adjustment mode 2
[Pr. PB06 Load to motor inertia ratio/load to motor
mass ratio]
[Pr. PB08 Position loop gain]
[Pr. PB09 Speed loop gain]
[Pr. PB10 Speed integral compensation]
[Pr. PB06 Load to motor inertia ratio/load to motor
mass ratio]
[Pr. PB07 Model loop gain]
[Pr. PB08 Position loop gain]
[Pr. PB09 Speed loop gain]
[Pr. PB10 Speed integral compensation]
Содержание MELSERVO-J4 series
Страница 2: ......
Страница 605: ...APPX Appendix 6 EC declaration of conformity 603 A ...
Страница 638: ...636 APPX Appendix 14 Encoder output pulse setting method MEMO ...
Страница 645: ......







































































