





























5 PARAMETERS
5.2 Detailed list of parameters
197
5
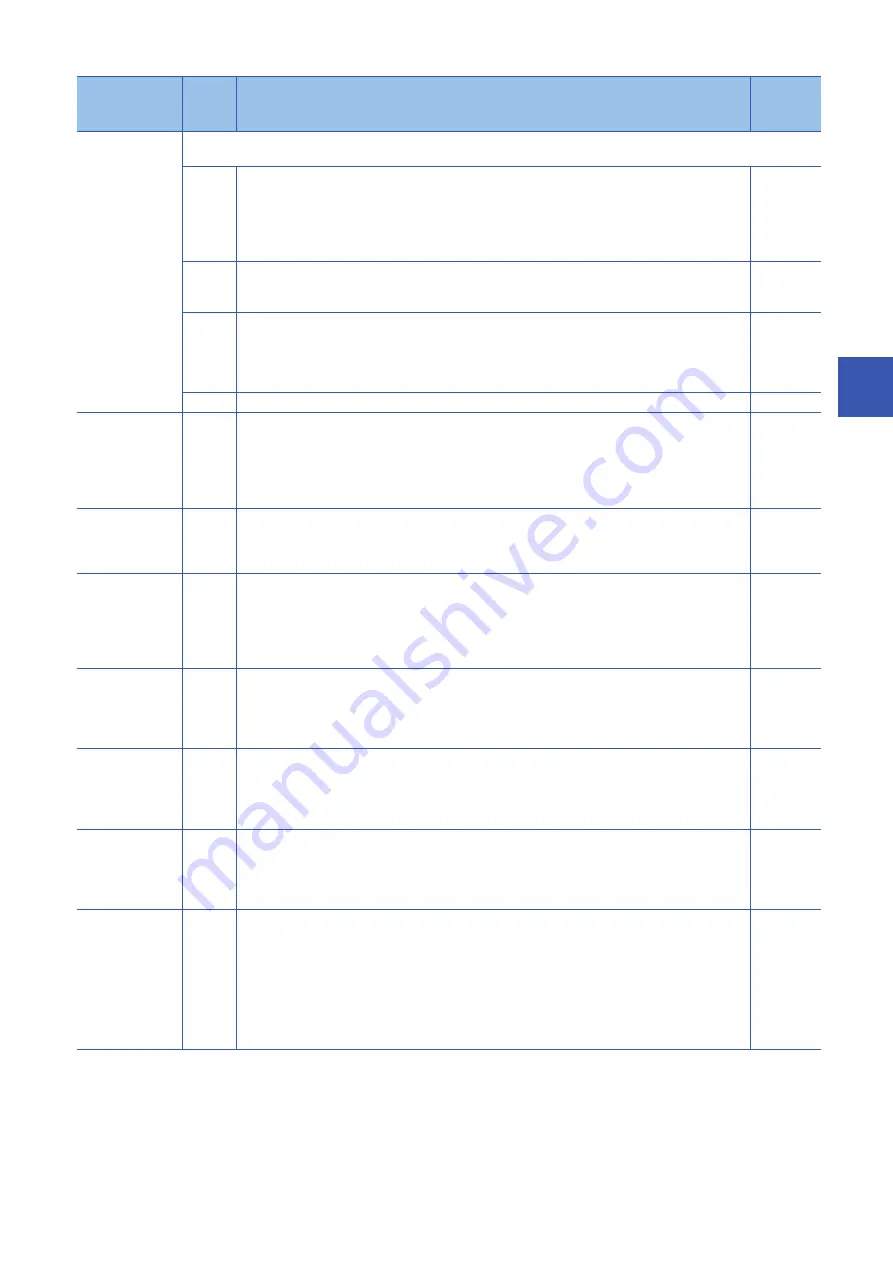
PB26
*CDP
Gain switching
function
Select a gain switching condition.
Set conditions to enable the gain switching values set in [Pr. PB29] to [Pr. PB36] and [Pr. PB56] to [Pr. PB60].
_ _ _ x
Gain switching selection
0: Disabled
1: Switching is enabled by control command from controller and Input device CDP (Gain switching).
2: Command frequency
3: Droop pulses
4: Servo motor speed
0h
_ _ x _
Gain switching condition selection
0: Gain after switching is enabled with gain switching condition or more
1: Gain after switching is enabled with gain switching condition or less
0h
_ x _ _
Gain switching time constant disabling condition selection
0: Switching time constant enabled
1: Switching time constant disabled
2: Return time constant disabled
Page 264 Gain switching procedure
0h
x _ _ _
For manufacturer setting
0h
PB27
CDL
Gain switching
condition
Set the value of the gain switching (command frequency, droop pulses, or servo motor speed) selected in [Pr.
PB26].
The set value unit differs depending on the switching condition item.
The unit "r/min" will be "mm/s" for linear servo motors.
Setting range: 0 to 65535
10
[kpulse/s]/
[pulse]/
[r/min]
PB28
CDT
Gain switching time
constant
Set the time constant at which the gains will change in response to the conditions set in [Pr. PB26] and [Pr.
PB27].
Setting range: 0 to 100
1 [ms]
PB29
GD2B
Load to motor
inertia ratio/load to
motor mass ratio
after gain switching
Set a load to motor inertia ratio/load to motor mass ratio for when gain switching is enabled.
This parameter is enabled only when "Gain adjustment mode selection" is set to "Manual mode (_ _ _ 3)" in
[Pr. PA08].
Setting range: 0.00 to 300.00
7.00 [times]
PB30
PG2B
Position loop gain
after gain switching
Set the position loop gain for when the gain switching is enabled.
When a value less than 1.0 rad/s is set, the value will be the same as that of [Pr. PB08].
This parameter is enabled only when "Gain adjustment mode selection" is set to "Manual mode (_ _ _ 3)" in
[Pr. PA08].
Setting range: 0.0 to 2000.0
0.0 [rad/s]
PB31
VG2B
Speed loop gain
after gain switching
Set the speed loop gain for when the gain switching is enabled.
When a value less than 20 rad/s is set, the value will be the same as that of [Pr. PB09].
This parameter is enabled only when "Gain adjustment mode selection" is set to "Manual mode (_ _ _ 3)" in
[Pr. PA08].
Setting range: 0 to 65535
0 [rad/s]
PB32
VICB
Speed integral
compensation after
gain switching
Set the speed integral compensation for when the gain switching is enabled.
When a value less than 0.1 ms is set, the value will be the same as that of [Pr. PB10].
This parameter is enabled only when "Gain adjustment mode selection" is set to "Manual mode (_ _ _ 3)" in
[Pr. PA08].
Setting range: 0.0 to 5000.0
0.0 [ms]
PB33
VRF11B
Vibration
suppression control
1 - Vibration
frequency after gain
switching
Set the vibration frequency for vibration suppression control 1 for when the gain switching is enabled.
When a value less than 0.1 Hz is set, the value will be the same as that of [Pr. PB19].
This parameter will be enabled only when the following conditions are fulfilled.
• "Gain adjustment mode selection" is set to "Manual mode (_ _ _ 3)" in [Pr. PA08].
• "Vibration suppression control 1 tuning mode selection" is set to "Manual setting (_ _ _ 2)" in [Pr. PB02].
• "Gain switching selection" is set to "Switching is enabled by control command from controller and Input
device CDP (Gain switching) (_ _ _ 1)" in [Pr. PB26].
Switching during driving may cause a shock. Be sure to switch them after the servo motor stops.
Setting range: 0.0 to 300.0
0.0 [Hz]
No./symbol/
name
Setting
digit
Function
Initial
value
[unit]
Содержание MELSERVO-J4 series
Страница 2: ......
Страница 605: ...APPX Appendix 6 EC declaration of conformity 603 A ...
Страница 638: ...636 APPX Appendix 14 Encoder output pulse setting method MEMO ...
Страница 645: ......







































































