






















Specialized Concentrated Focused
Appendix
「
125
」
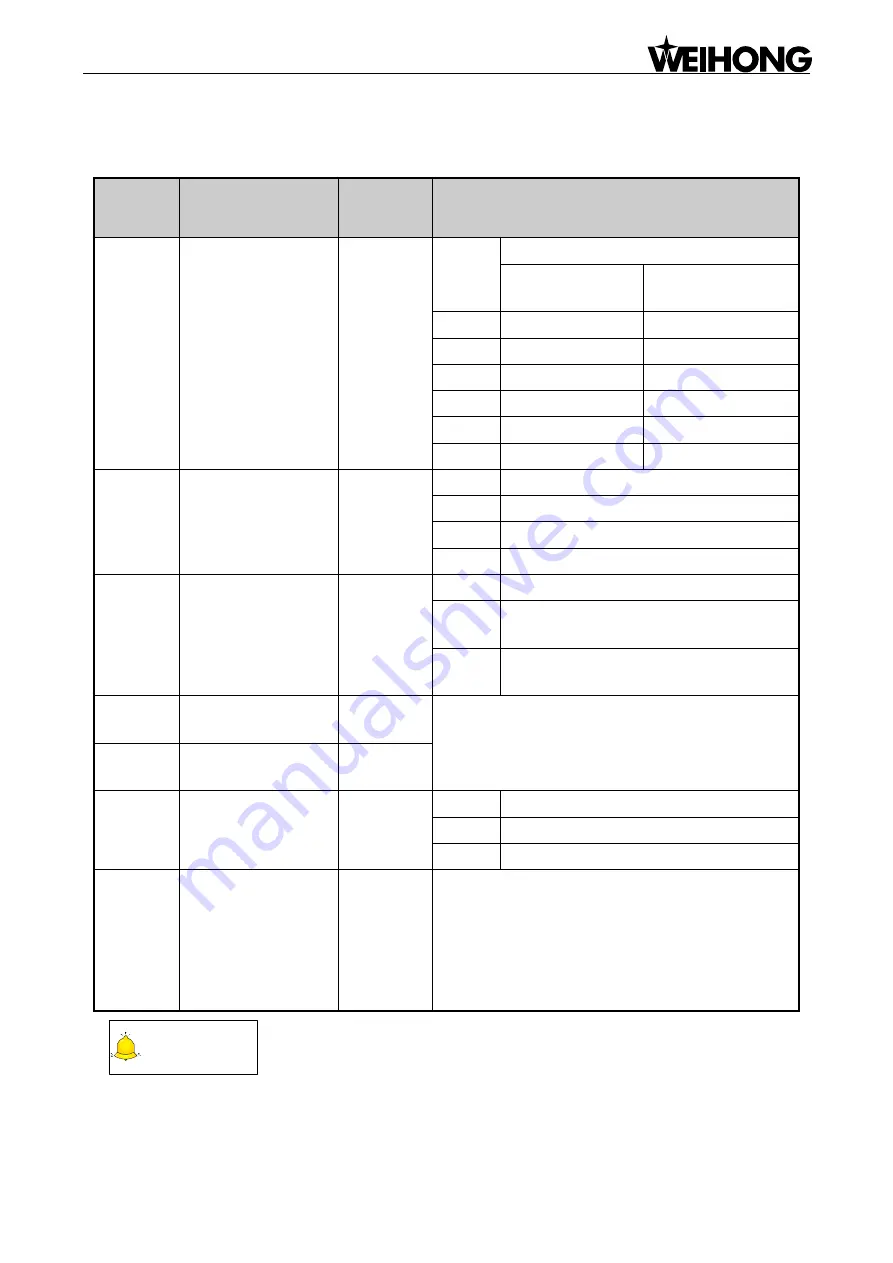
7.4.18. Parameter Setting of TECO TSDA Servo Driver
Para.
No.
Function
Value
Description
Pn010-1
Set control mode
1
Value
Control mode
CN1 Pin12 open
circuit
CN1 Pin12 closed
circuit
0
Speed control
Speed control
1
Position control
Position control
2
Torque control
Torque control
3
Speed control
Speed control
4
Position control
Position control
5
Torque control
Torque control
Pn010-2
Set the pulse input
format
under
position
control
mode
0
Value
The format of pulse input
0
Pulse + direction
1
Dipulse
2
A/B phase difference
Pn010-3
Set
rotation
direction of motor
1
Value
Function
0
Input positive order, motor rotates
anti-clockwise.
1
Input positive order, motor rotates
clockwise.
Pn021
Electronic gear ratio
numerator
Need
calculation
The input pulse amount will be multiplied by this
ratio before output. Ratio range of parameter 21 to
22:
1/127
<
parameter 21/ parameter 22
<
127
Pn022
Electronic gear ratio
denominator
Need
calculation
Pn011-4
Set the value of
Pin20 of CN1
1
Value
Function
0
Output of ―0‖ speed signal
1
Output of brake signal
Pn013-1
Set the maximum
pulse
frequency
received
by
the
driver
under
position
control
mode
7
It can correct the phenomenon of unauthorized
over-travel. Received frequency is divided into 8
segments from 500Kpps to 200Kpps.
―0‖ indicates
500Kpps while
―7‖ 200Kpps.
CAUTION
For parameter setting of a specific driver, refer to the driver manual.







































































