





























Functional description
page 25
rev. 00 / 04.09.2017
13 Functional Principle
13.1 Flow Velocity Detection
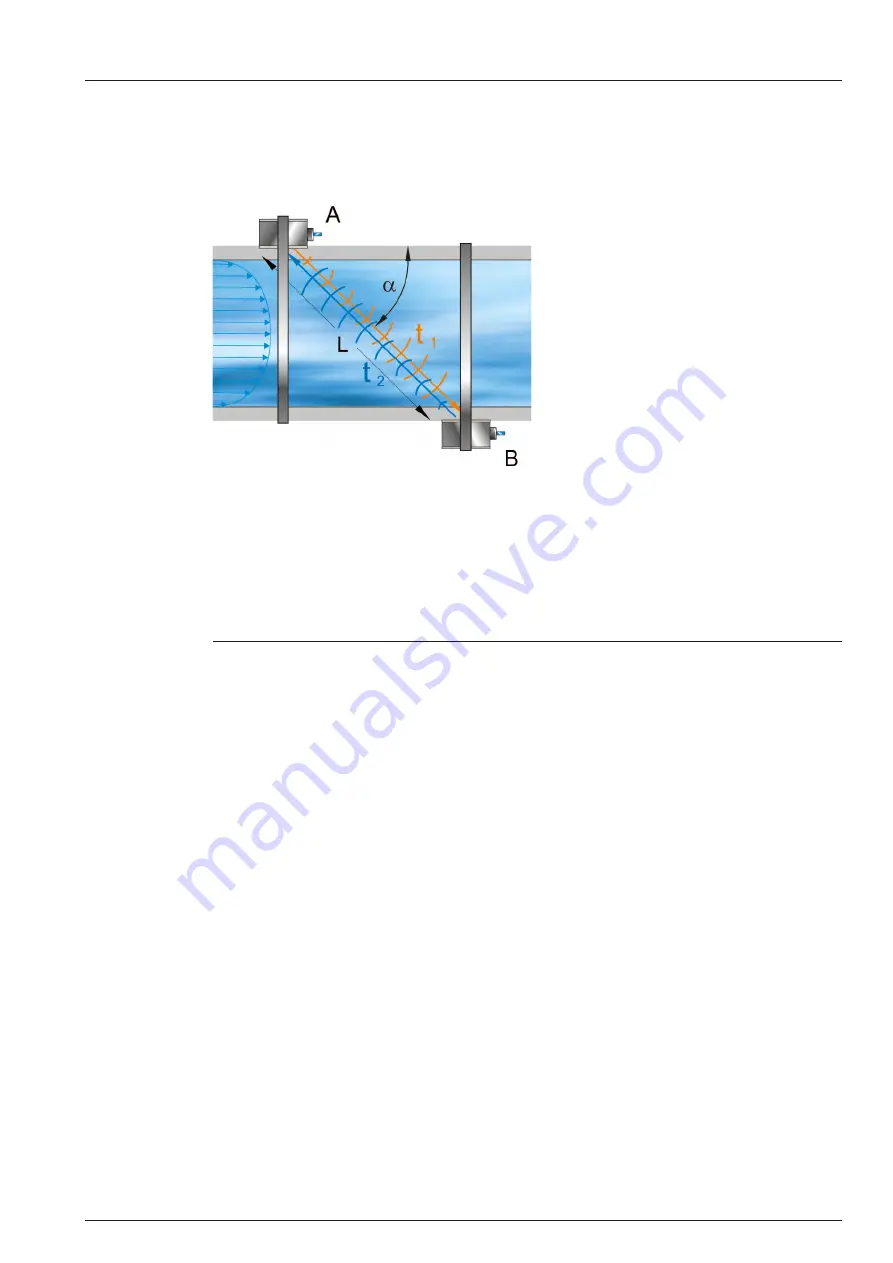
The flow velocity is determined by using the ultrasonic transit time principle.
A Sensor 1
B Sensor 2
α
defined angle
t
1
Time of impulse towards flow direction
t
2
Time of impulse in flow direction
L
Transit time
Fig. 13-1
One-path transit time measurement principle
This measurement principle is based on directly measuring the transit time of acoustic signals
between two ultrasonic sensors, the so-called hydro-acoustic converters.
The transit time difference method does not determine the average flow velocity, but the
effective velocity of sound propagation upstream (decelerated due to flow) and downstream
(accelerated due to flow).
Two sound impulses are transmitted consecutively and the different transit times between
transmitter and receiver are measured.
• The upstream impulse requires a certain amount of time t
1
• The downstream impulse requires s shorter amount of time t
2
Sound heading downstream will reach the receiver within a shorter period than sound heading
upstream. The difference between the transit times is proportional to the average flow velocity
within the measurement path.
There is no transit time difference as soon as both sensors receive the transmitted ultrasonic
impulses simultaneously. There is no measurable flow available.
The NivuFlow 600 Mobile operates both using clamp-on sensors as well as wet sensors. The
clamp-on sensors are installed on the outside of the pipe. In this case the transit time through
the pipe wall is calculated and considered.
In order to determine the flow rate, the cross section as well as the flow geometry of the pipe,
the canal or the water body must be known. The propagation of sound will either be deceler-
ated (upstream) or accelerated (downstream) depending on the flow direction of the medium.