





























11 - 27
Chapter 11 Manual Control
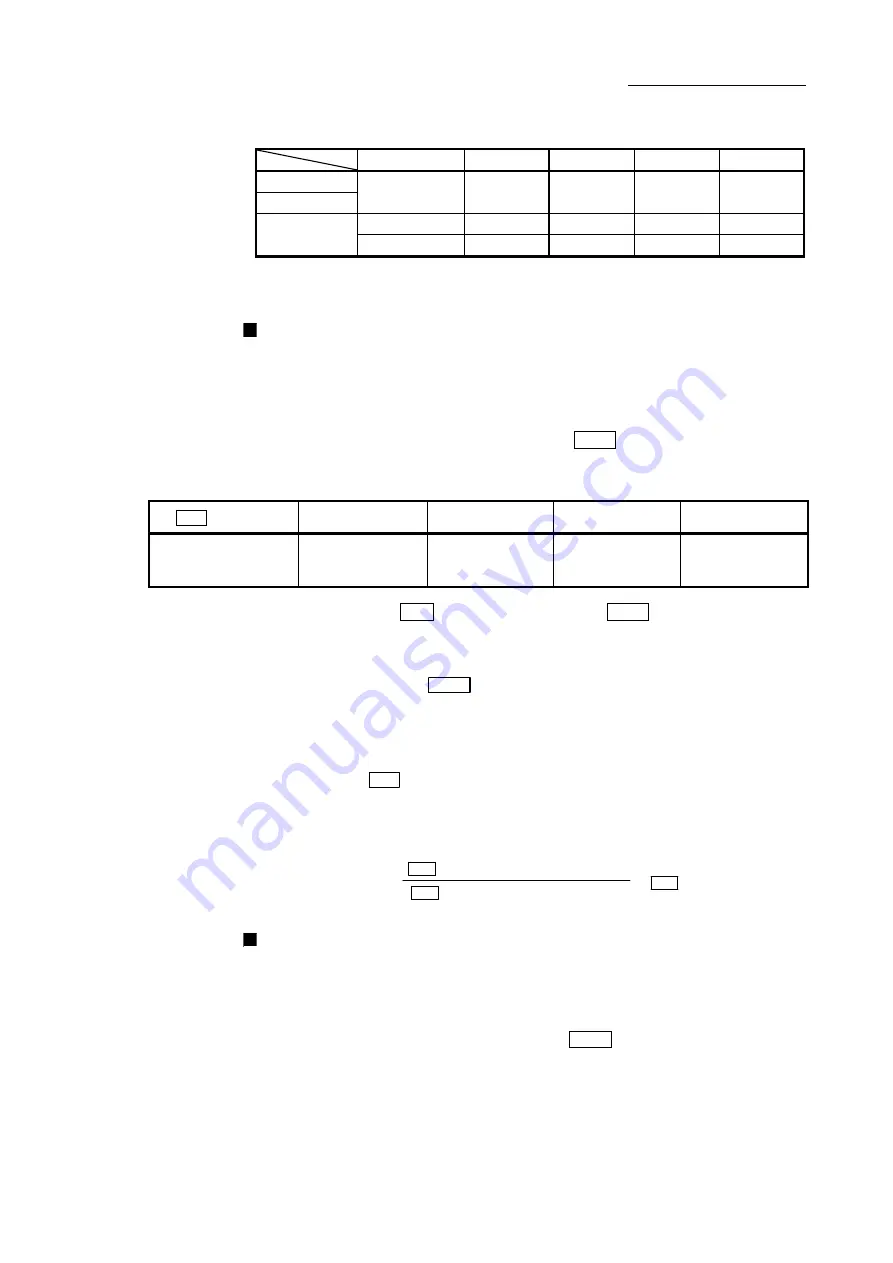
Normal timing times
Unit : [ms]
Operation
cycle
t1 t2 t3 t4
QD77MS2
QD77MS4
0.88
0.6 to 0.9
10.0 to 13.7
18.0 to 25.0
9.6
0.88
0.6 to 0.9
10.0 to 13.7
18.0 to 25.0
9.6
QD77MS16
1.77
0.8 to 1.8
10.0 to 14.8
18.0 to 25.0
9.6
•
Delays may occur in the t1 timing time due to the operation status of other axes.
Position control by manual pulse generator operation
In manual pulse generator operation, the position is moved by a "manual pulse
generator 1 pulse movement amount" per pulse.
The current feed value in the positioning control by manual pulse generator
operation can be calculated using the expression shown below.
Current feed value = Number of input pulses ×
Cd.20
Manual pulse generator 1
pulse input magnification × Manual pulse generator 1 pulse
movement amount
Pr.1
Unit setting
mm inch
degree
PLS
Manual pulse generator
1 pulse movement
amount
0.1µm 0.00001inch
0.00001degree 1PLS
For example, when "
Pr.1
Unit setting" is mm and "
Cd.20
Manual pulse
generator 1 pulse input magnification" is 2, and 100 pulses are input from the
manual pulse generator, the current feed value is as follows.
100 × 2 × 0.1 = 20 [µm] ("
Md.20
Current feed value
"=200)
The number of pulses output actually to the servo amplifier is "Manual pulse
generator 1pulse movement amount/movement amount per pulse
(Note)
". For
example, when "
Pr.1
Unit setting
" is mm and the movement amount per pulse is
1
μ
m, 0.1/1 = 1/10, i.e., the output to the servo amplifier per pulse from the manual
pulse generator is 1/10pulse. Thus, the QD77MS outputs 1pulse to the servo
amplifier after receiving 10pulses from the manual pulse generator.
(Note): Movement amount per pulse =
"
Pr.3
Movement amount per rotation(AL)
"
"
Pr.2
Number of pulses per rotation(AP)"
×
"
Pr.4
Unit magnification(AM)
"
Speed control by manual pulse generation operation
The speed during positioning control by manual pulse generator operation is a
speed corresponding to the number of input pulses per unit time, and can be
obtained using the following equation.
Output command frequency = Input frequency
×
Cd.20 Manual pulse generator
1 pulse input magnification
Summary of Contents for MELSEC-Q QD77MS
Page 1: ......
Page 27: ...A 26 MEMO...
Page 29: ...MEMO...
Page 101: ...3 34 Chapter 3 Specifications and Functions MEMO...
Page 232: ...5 111 Chapter 5 Data Used for Positioning Control MEMO...
Page 315: ...5 194 Chapter 5 Data Used for Positioning Control MEMO...
Page 337: ...6 22 Chapter 6 Sequence Program Used for Positioning Control...
Page 338: ...6 23 Chapter 6 Sequence Program Used for Positioning Control...
Page 339: ...6 24 Chapter 6 Sequence Program Used for Positioning Control...
Page 340: ...6 25 Chapter 6 Sequence Program Used for Positioning Control...
Page 341: ...6 26 Chapter 6 Sequence Program Used for Positioning Control...
Page 342: ...6 27 Chapter 6 Sequence Program Used for Positioning Control...
Page 343: ...6 28 Chapter 6 Sequence Program Used for Positioning Control...
Page 344: ...6 29 Chapter 6 Sequence Program Used for Positioning Control...
Page 345: ...6 30 Chapter 6 Sequence Program Used for Positioning Control...
Page 346: ...6 31 Chapter 6 Sequence Program Used for Positioning Control...
Page 347: ...6 32 Chapter 6 Sequence Program Used for Positioning Control...
Page 348: ...6 33 Chapter 6 Sequence Program Used for Positioning Control...
Page 349: ...6 34 Chapter 6 Sequence Program Used for Positioning Control...
Page 353: ...6 38 Chapter 6 Sequence Program Used for Positioning Control...
Page 354: ...6 39 Chapter 6 Sequence Program Used for Positioning Control...
Page 357: ...6 42 Chapter 6 Sequence Program Used for Positioning Control...
Page 359: ...6 44 Chapter 6 Sequence Program Used for Positioning Control...
Page 360: ...6 45 Chapter 6 Sequence Program Used for Positioning Control...
Page 361: ...6 46 Chapter 6 Sequence Program Used for Positioning Control...
Page 363: ...6 48 Chapter 6 Sequence Program Used for Positioning Control...
Page 364: ...6 49 Chapter 6 Sequence Program Used for Positioning Control...
Page 413: ...MEMO...
Page 433: ...8 20 Chapter 8 OPR Control MEMO...
Page 458: ...9 25 Chapter 9 Major Positioning Control MEMO...
Page 593: ...10 30 Chapter 10 High Level Positioning Control MEMO...
Page 625: ...11 32 Chapter 11 Manual Control MEMO...
Page 659: ...12 34 Chapter 12 Expansion Control MEMO...
Page 767: ...13 108 Chapter 13 Control Sub Functions MEMO...
Page 813: ...14 46 Chapter 14 Common Functions MEMO...
Page 831: ...15 18 Chapter 15 Dedicated Instructions MEMO...
Page 846: ...16 15 Chapter 16 Troubleshooting MEMO...
Page 892: ...16 61 Chapter 16 Troubleshooting MEMO...
Page 971: ...Appendix 62 Appendices MEMO...
Page 974: ......
Page 975: ......







































































