





























59
KATANA S610M Inverter Specialized for Elevator Manual
6.9 Encoder Parameters (Group F08)
Function Code
Name
Setting Range
Factory Default Value
F08.00
PG type
0
~
3
1
This parameter is for selecting encoder type.
0: ABZ incremental
1: SIN/COS
2
:
Endata Absolute Value
-
Heidenhain ECN1313/ECN413(reserved)
3
:
UVW incremental (reserved)
Note: 0 is for asynchronous motor and 1~3 are for synchronous motor
F08.01
PG pulses per revolution
1
~
10000
2048
This parameter is for setting pulse per revolution (PPR) for selected pulse encoder.
Attentions:
When speed sensor is operating, this parameter must be set correctly, otherwise the motor cannot operate
normally.
F08.02
PG rotating direction
0
~
1
0
0: A ahead of B
1: B ahead of A
When the motor is operating forward, A is ahead of B; when the motor is operating in reverse, B is ahead of
A. If the indicating directions of the command of wiring between inverter interface board and PG match with that
of wiring between the inverter and the motor, please set this parameter to 0 (forward); otherwise set to 1
(reverse).
By modifying this parameter, the corresponding relation between wiring directions can be easily adjusted
without needs to rewiring.
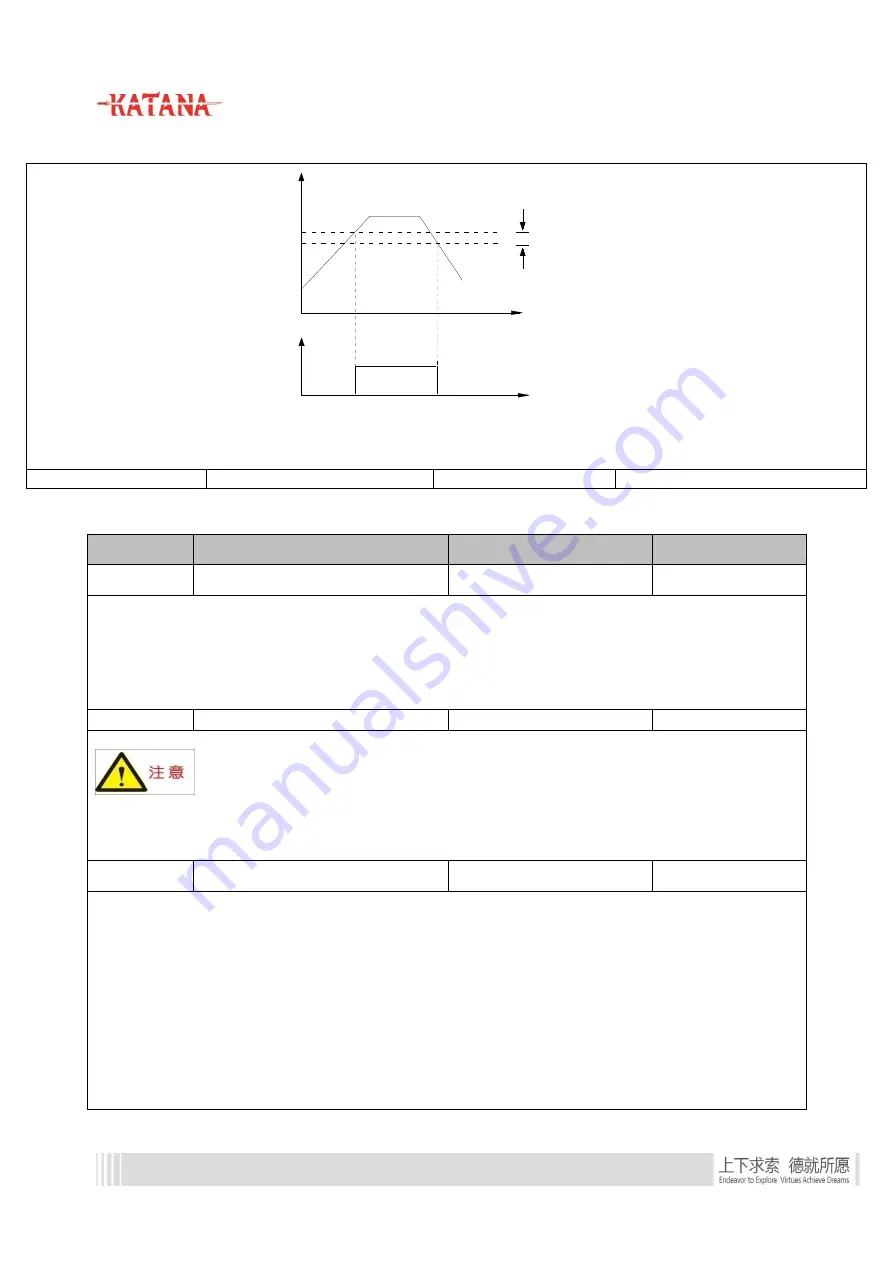
Figure 6-8 Frequency level detection sketch
F07.24~F07.37
Reserved
Time
Y
FDT1 level
Output
frequency
FDT1 delay
Time







































































