


























166
The command unit is the unit used for position and distance between upper controller and drives. The mini. Command unit is 1.
The function of command division and multiplication is to change the position data from command unit to encoder pulse unit.
Set the command division and multiplication by
「
command division and multiplication
(
Numerator
)」
No. 34. 0
)
and
「
command
division and multiplication
(
Denominator
)」
No. 36. 0
)
. Save the parameters if the command division and multiplication changes
and execute the home position return after the power ON again.
Make sure the range for the ratio of command division and multiplication is 1 to 1000. (In pulse command mode, the range is 0.
001 to 1000).
[3.3 Operation range for position and position command overflow detection]
The operation range for position (ABS position command) of Point table:
Absolute position: -1, 073, 741, 823
~
+1, 073, 741, 823 [command unit]
Whether the
「
Position command overflow/ home position return failure
」
alarms or not, after the position of Point table (ABS
position command value) exceeds the range described above, can be selected by
「
Internal speed command - Overflow
detection option
」
(No. 643. 0
)
. When set it to “0=Disable”, the absolute value cannot be specified to the command method. For
details, refer to
「
Parameter description Internal speed command - Overflow detection option
」
.
[3.4 Parameter description]
No.
Name
Unit
642. 0
Internal speed command - Operation mode
-
Set Operation mode for internal position command.
0 = Point Table
1 = Communication operation
2 = Manual pulse input
No.
Name
Unit
643. 0
Internal speed command - Overflow detection option
-
Enable/Disable Internal position command Overflow detection function
0 = Disable
1 = Enable (Initial setting)
The function of Internal speed command - Overflow detection option is to prevent the target position of Point table and
communication operation(test run) exceeding the absolute position range to make the absolute position disappear. If the target
position (ABS position command value) exceeds absolute position range
(
-1, 073, 741, 823
~
+1, 073, 741, 823
)
, here can be
set for
「
Position command overflow/ home position return failure
」
to alarm or not.
Set it to “0= Disable” when outside the absolute position range and have the relative position command to the same direction
repeatedly.
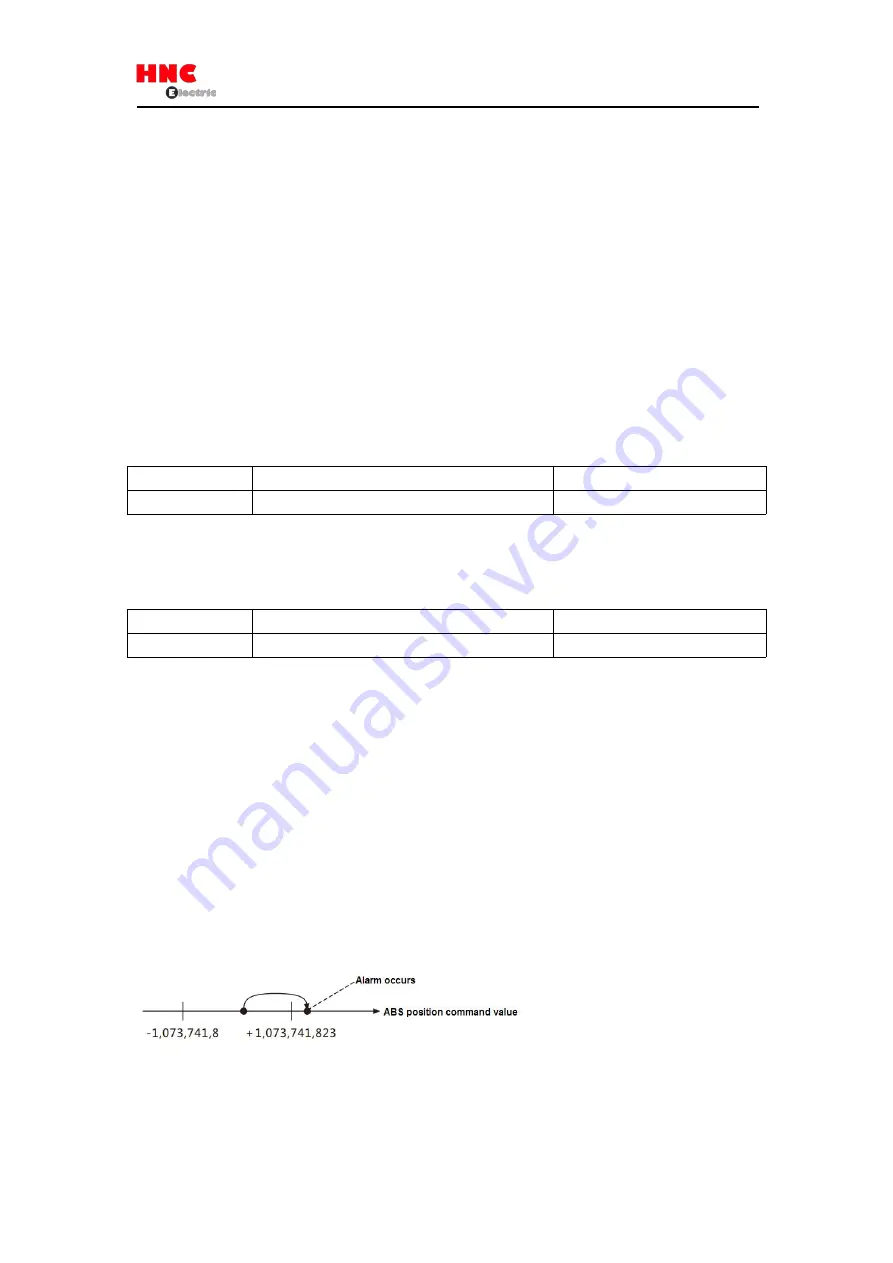
■
Conditions for alarm occurrence
1
)
Set to
“
1=Enable
”
The alarm occurs when the target position of ABS position command value exceed the range of -1, 073, 741, 823
~
+1, 073,
741, 823.
The alarm occurs when the ABS position command value exceeds the range of -1,073,741,823 to +1,073,741,823 after servo
On and the travel distance exceeds the range of -2,147,483,647 to +2,147,483,647.
Summary of Contents for SV-E3 Series
Page 21: ...21 ...
Page 25: ...25 ...
Page 27: ...27 ...
Page 28: ...28 ...
Page 29: ...29 ...
Page 30: ...30 3 5 Dimensions of servo drive Same dimensions for SV E3 ...
Page 41: ...41 Figure 5 3 1 ...







































































