





























126
P: Position control mode, S: Speed control mode, T: Torque control mode indicates it can input signals
「○ 」
and
「 △」
in different control modes.
「 △」
can switch signals according to command mode. For details, please refer to user I/O
connector CN1 terminal arrangements for each command mode.
Note 1) For I/O of locator function selection 1.
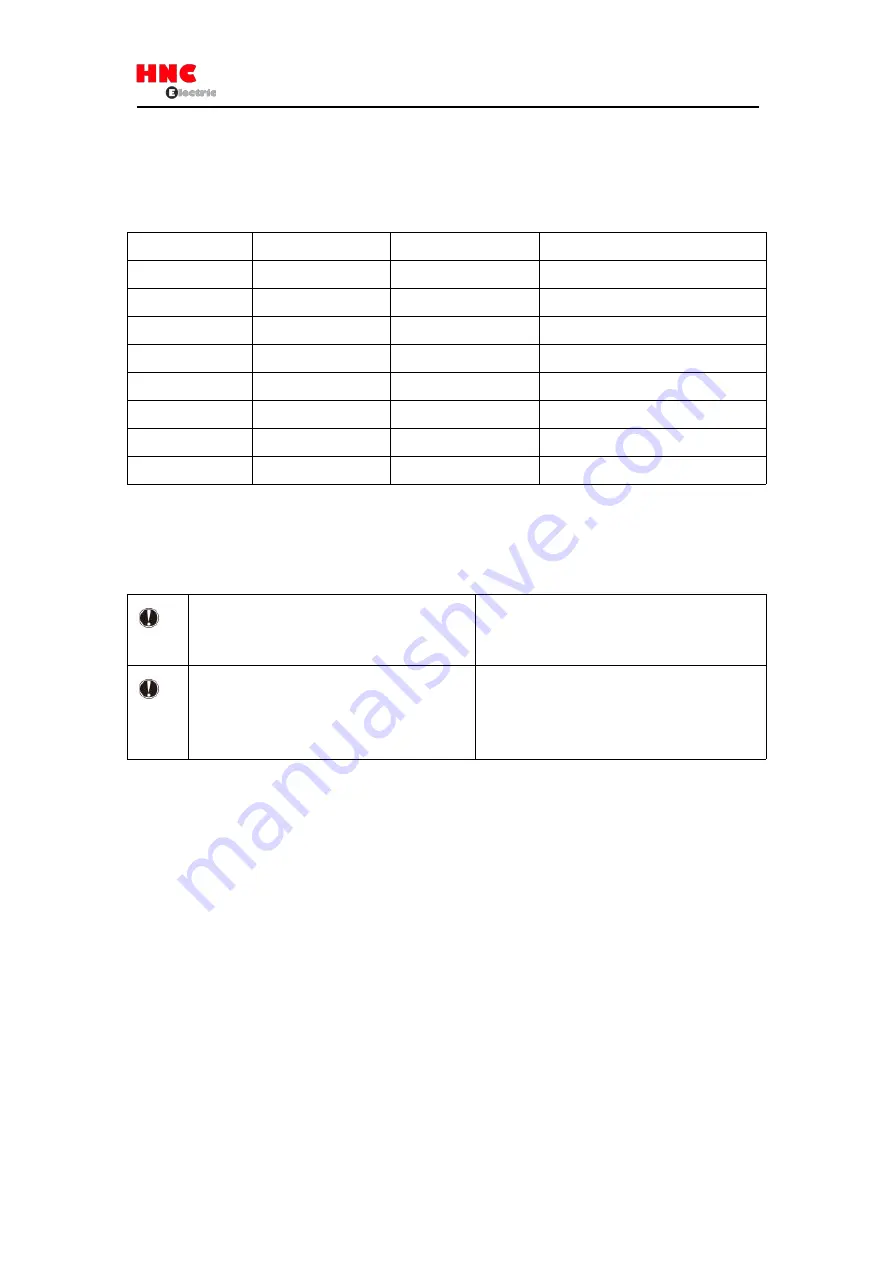
Table 8.7.4 Reserved pins
Signal name
Pin No.
Contents
Function
NC1
23
Reserved
●Reserved(Disconnected)
SP1
24
Reserved
-
SP2
25
Reserved
-
A_TRQ
34
Reserved
-
A_GND
35
Reserved
-
NC2
46
Reserved
●Reserved(Disconnected)
SP3
46
Reserved
-
SP4
48
Reserved
-
8.8 Adjustment
Table 8.8.1
Before auto tuning, perform the safety measures, such
as danger-prevention, immediate stop and impact
reducing.
To prevent the injury and accidents caused by
unexpected unstable operation and too much impact.
In the auto tuning, the servo motor will operate at the
speed lower than the acceleration/deceleration. After
confirm it can operate safely, improve the acceleration
/deceleration gradually and adjust them.
To prevent the injury and accidents caused by
unexpected unstable operation and too much impact.
■
The following occasions may not be suitable for auto tuning.
●
The inertia is too small, or too large, or the load inertia changes a lot.
●
Mechanical rigidity is too low
●
Speed is too low(300r/min or less), and acceleration/deceleration is slow.
●
Unbalance load and friction is too large, or the torque is too large or too small
In this case, please set the inertia ratio according to the calculated value.
■
The noise and vibration may occur before the estimated load characteristic settles at servo ON or control gain level changes.
After settling, the error may disappear. If not, perform the following measures.
●
Reduce the control gain level
●
Set the inertia ratio according to the calculated value in the mechanical device.
8.8.1 Simple tuning
■
Parameter description
①
Selection of inertia condition (only for position control mode)
The characteristic of inertia condition are shown is Table 8.8.2 and Figure 8.8.1. Select it according to the device load
characteristic.
1: Applicable for the device that needs to control the heavy load, or the device that the load changes a lot, or the device of low
rigidity (emphasis on stability).
Summary of Contents for SV-E3 Series
Page 21: ...21 ...
Page 25: ...25 ...
Page 27: ...27 ...
Page 28: ...28 ...
Page 29: ...29 ...
Page 30: ...30 3 5 Dimensions of servo drive Same dimensions for SV E3 ...
Page 41: ...41 Figure 5 3 1 ...







































































