





























68
method at drive
restriction input
the following combination methods.
0=Free-run
1=Short brake
2= Prompt stop
Combin
ation
Deceleration method
No.67.1
Stopping method
No.67.2
1
0: Free-run
0: Free-run
2
1: Short brake
0; Free-run
3
2: Prompt stop
1: zero clamp
4
2: Prompt stop
0: Free-run
[Initial setting] 1
[Setting range] 0 to 2
067.2
[Basic setting]
Selection of stop
status at drive
restriction
Select stop status at drive restriction.
Note) Do not modify the parameter while the servo is ON.
When using deceleration method No.67.1 and stopping method No.67.2, please follow
the above combination methods.
0= Free-run
1= zero clamp
[Initial setting] 1
[Setting range] 0 or 1
No
067.3
[Basic setting]
Selection of
position difference
counter status at
drive restriction
Select position difference counter status at drive restriction
Note) Do not modify the parameter while the servo is ON.
0= Keep
1=Clear
[Initial setting] 1
[Setting range] 0 or 1
No
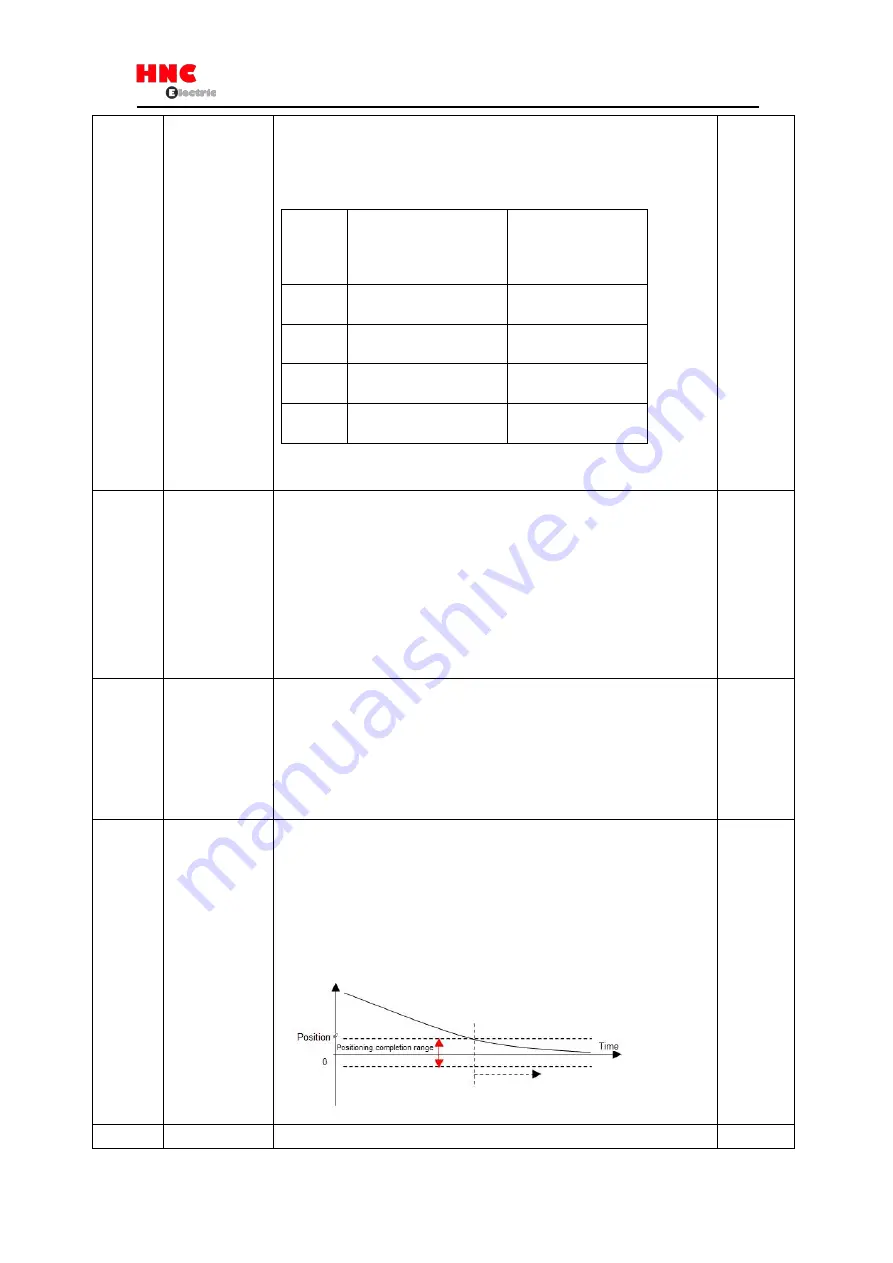
068.0
[Basic setting]
Positioning
completion range
As the reference of outputting positioning completion signal to upper controller, this
parameter is the pulse width for judging positioning completion.
The setting value should be less than the number of positioning judge pulse of upper
controller.
[Initial value] 40[Pulse]
(±
40[pulse]
)
[Setting range] 0 to 32767
No
069.0
[Basic setting]
As the reference of outputting positioning completion signal to upper controller, this No
Summary of Contents for SV-E3 Series
Page 21: ...21 ...
Page 25: ...25 ...
Page 27: ...27 ...
Page 28: ...28 ...
Page 29: ...29 ...
Page 30: ...30 3 5 Dimensions of servo drive Same dimensions for SV E3 ...
Page 41: ...41 Figure 5 3 1 ...







































































