





























155
・
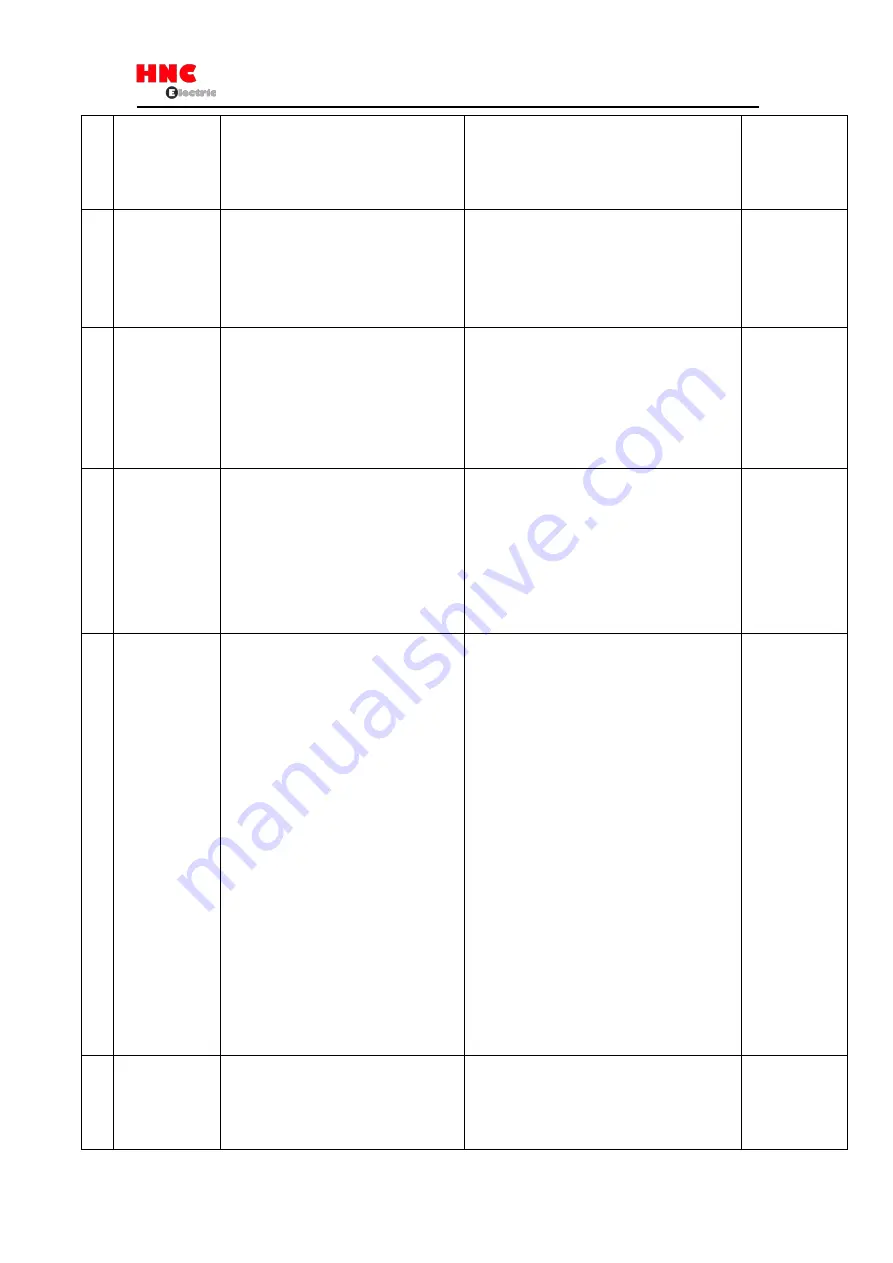
The combination of motor and drive is
incorrect.
・
The encoder cable does not connect to the
drive correctly.(including disconnect).
・
Please Check the encoder cable.
power supply
4
Overspeed error
・
Motor rotates exceeding the max. speed
・
Inappropriate command from upper
controller
・
Accumulated pulses maybe caused by
「
drive restriction
」
・
Please adjust the parameters.
・
Check the command
・
Check if the limit sensor position changes.
Reset
5
Speed deviation
error
Position control and speed control error
・
Inappropriate command
・
Overload, cannot catch up with the
command speed
・
Speed
deviation
error
detection
value(No.90.0) is incorrect
・
Check the command from the upper controller
・
Adjust gain parameter
・
Check the setting value of Speed deviation error
detection value(No.90.0).
・
Check if the brake has been released
・
Check whether the torque limit operates or not
Reset
6
Position deviation
error
Position control error
・
The acceleration time is too short
・
The power cable or encoder cable wiring
error or disconnect
・
Position deviation error Detection value
(No.87.0) is incorrect
・
Adjust gain parameter
・
Check the command from the upper controller
・
Check the wiring
・
Check the setting value of Position deviation error
Detection value (No.87.0)
・
Check if the brake has been released
・
Check whether the torque limit operates or not
Reset
7
Overload error
Position control error after operation starts:
1. The motor does not operate
2. Motor operates for a short time
3.Alarm occurs after operation starts
In operating
4.In operating, alarm occurs at the same
period
The acceleration time is too short or no
acceleration. (bump into other objects)
5,Motor capacity is too small /too heavy load
6. Excessive vibration
7.Control gain or command not correct(CCW
rapidly)
8.Noise occurs
Continuous operation can cause overload or burn
the motor.
1&2.
・
Check the motor power cable wiring
3.
・
Check the selected motor capacity
・
Check if the brake has been released
・
Check the reduction ratio
4.
・
Check the acceleration time, torque
waveform , load rate [in acceleration]
・
Check there are no obstacles to the driving
range [Outside the acceleration]
5.
・
Check the torque waveform and load rate
・
Check the inertia ratio
→
Install the reducer to improve the motor capacity
6&7.
・
Adjust gain parameter
・
Check if there are rapid CCW in command
・
Use command smoothing filter
8.
・
Use notch filter and low-pass filter to suppress
the noise
Reset
8
Command
overspeed error
Position control error
・
Position command input exceed max. speed
・
The command from upper controller is
inappropriate.
・
Check Command division and multiplication
(No.34.0
、
No.36.0)
・
Check the command from upper controller
Reset
Summary of Contents for SV-E3 Series
Page 21: ...21 ...
Page 25: ...25 ...
Page 27: ...27 ...
Page 28: ...28 ...
Page 29: ...29 ...
Page 30: ...30 3 5 Dimensions of servo drive Same dimensions for SV E3 ...
Page 41: ...41 Figure 5 3 1 ...







































































