



























C
L E A R
P
A T H
M C / S D
U
S E R
M
A N U A L
R
E V
.
3 . 0 9
1 4 8
T
EKNIC
,
I
NC
. T
EL
.
(585)
784-7454
F
OLLOW
D
IGITAL
P
OSITION
C
OMMAND
:
F
REQUENCY
C
OMMAND
M
ODE
S
UMMARY
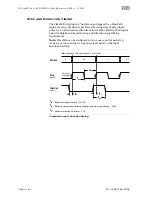
ClearPath will servo to a position between two user-defined limits based
on the frequency of the signal on Input B.
Signal
Function
Input Type
Input A
Motor position (as % of total span) vs. time
Enable
Home Sensor
Command Lock
Enable
Logic: High=In Sensor Low=Not in Sens.
Logic: High=Lock ON Low=Lock OFF
Logic: High=Enable Low=Disable
0
1
0
1
t
Example Timing
Notes:
Home sensor not used in this example. See Homing section for details.
0
1
0
1
Frequency of signal (as % of user-defined freqency range)
80%
50%
20%
OFF
or
0%
100%
50%
80%
20%
Cmd. Lock = ON
Input B
Position
Pulse: Variable Frequency
0
1
Follow Digital Position: Frequency Command
Position Control
I/O
F
UNCTIONS
Enable Input -
Asserting this input energizes the motor shaft.
Input A -
Asserting this input will make ClearPath continue to servo to its
current position regardless of any changes to the frequency on Input B.
Alternatively, this signal can be used as a home sensor input.
Input B -
This input is connected to a digital signal whose frequency
represents the desired position.
Output (HLFB) -
See HLFB section for available modes.
Notes:
•
A signal frequency on Input B equal to the user-defined
minimum will move the motor to position 0. A frequency equal
to the user-defined maximum will move the motor to position 1.
•
Input frequency range: 20 Hz to 700 kHz.
•
Frequencies between the minimum and maximum will
command positions (proportionally) between position 0 and 1.
•
If there are no transitions on Input B for 50 ms or more, this
will be considered an error condition, and the motor will hold
its current position.
MCPV
Available on







































































