






C
L E A R
P
A T H
M C / S D
U
S E R
M
A N U A L
R
E V
.
3 . 0 9
2 8
T
EKNIC
,
I
NC
. T
EL
.
(585)
784-7454
E
XAMPLE
A
PPLICATION
:
A
BSOLUTE
P
OSITIONING
M
ODE
Read this section for a brief introduction to ClearPath technology and
terminology through an example application. Please visit
S
UMMARY OF
O
PERATION
Note: This section describes only one example application in one mode of
operation
. Absolute Positioning (4-position) mode allows you to define up
to four target positions and command moves between any of them simply
by changing the logical states of the ClearPath inputs.
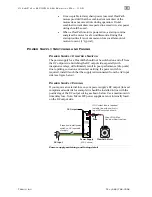
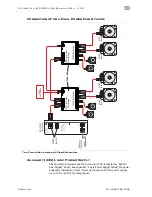
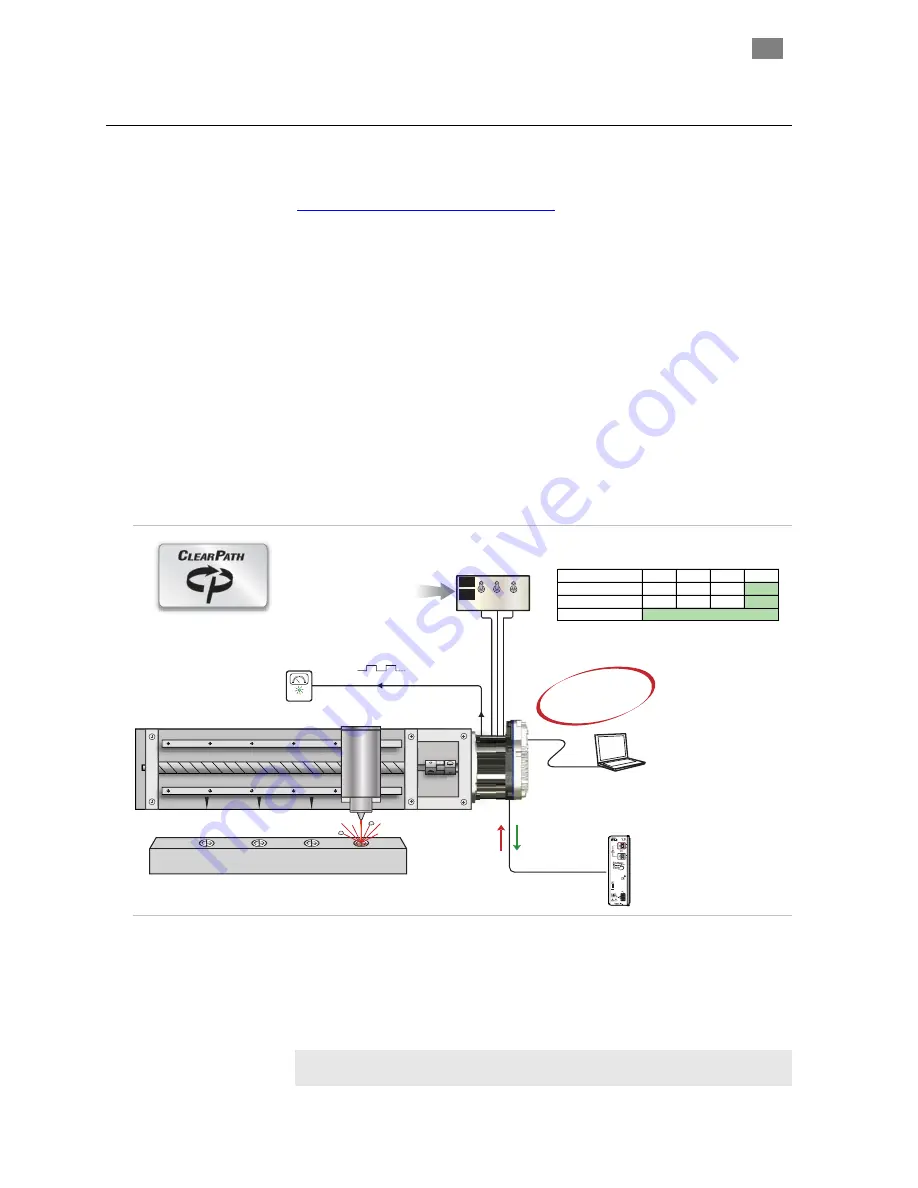
In the figure below, a ClearPath model MCPV is coupled to a ball screw
positioning stage. For now, we’ll say that ClearPath has already been
configured and programmed via the included MSP software. This just
means that the mode of operation, target positions, velocity, acceleration,
and options are already stored in ClearPath memory and the motor is
tuned and ready to go. ClearPath configuration and setup will be
discussed later in this section.
Windows PC
With USB port
Running MSP software
•
Set Operational Mode
•
Set speeds and accelerations
•
Set move distances
•
Manage options
•
Perform tuning
•
Monitor system performance
DC Power Supply
Range: 24-75VDC
Signal Source (to ClearPath Inputs)
3 Inputs / 5-24VDC Compatible:
•
PLC
•
Switches
•
Sensors
•
Encoder
•
Microcontroller
HLFB (High-Level Feedback)
5-24VDC Compatible
•
User-settable
•
Move Done mode
•
PWM Speed Output mode
•
Brake Control signal
•
Servo On mode
DC power to
ClearPath
Regenerated
energy back to
to power supply
Input Control
HLFB Output
JWunsch 2014
Model shown:
Teknic IPC-5 (75VDC)
High
Low
H
No P
C requir
ed
after
setup!
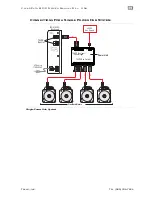
A B En
Example Input Settings
4
3
2
1
Target Positions
ANNIICO
ANNIICO
BiiBiiBiiBiiBiiBiiBiiBii
BB-CO
Target Position
1
2
3
4
Input A state
LOW
HIGH
LOW
HIGH
Input B state
LOW
LOW
HIGH
HIGH
Enable state
HIGH
ClearPath Absolute Positioning (4-Position) Mode
Getting started.
To energize the motor, simply apply a DC voltage to the
Enable input. Once enabled, the motor is considered “live”, i.e. the motor
is energized and will execute moves in response to state changes at Inputs
A and B.
Caution:
Depending on the exact mode and settings selected, ClearPath
may automatically move upon enable
with no user changes to the inputs
.