





























C
L E A R
P
A T H
M C / S D
U
S E R
M
A N U A L
R
E V
.
3 . 0 9
1 4 2
T
EKNIC
,
I
NC
. T
EL
.
(585)
784-7454
M
ULTI
-S
ENSOR
P
OSITIONING
:
U
NIDIRECTIONAL
(S
ENSORLESS
H
OMING
)
M
ODE
D
ESCRIPTION
Use simple I/O from your PLC, microcontroller etc. to command
ClearPath to move to the sensor or switch of your choosing. Direction,
speed, and acceleration are all user-defined in MSP.
This mode starts by finding a user-defined, shaft angle home position.
Then, upon seeing a transition on Input A, ClearPath will start to move in
one, fixed, user-defined direction, at one of two velocities. ClearPath will
ramp to a stop at the user-defined rate when Input B has seen a count of
transitions equal to the count of transitions on Input A. (These transitions
are typically switch closures or sensor interruptions.)
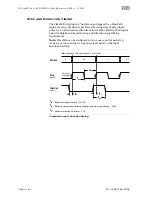
Signal
Function
Input Type
Input A
Motor position vs. time
Input B
Enable/
Start Move
Stop Move (Sensor)
Enable
Trigger
Pulse Enable line for Alternate Speed
Trigger
Stop on rising or falling edge*
Start on rising or falling edge*
Logic: High=Enable Low=Disable
0
1
0
1
t
p+
p-
Example Timing
Notes:
ClearPath can be programmed to home upon enable (see text for details).
*User may select rising or falling edge for input action (via MSP setup software).
This diagram shows moves starting on the falling edge of Input A and stopping
on the falling edge of Input B. Pulse Enable to execute next move at alternate speed.
0
1
Home
Trigger pulse
Trig.
Alt.
speed
Multi-Sensor Position: Unidirectional (Sensorless Homing)
Position Control
I/O
F
UNCTIONS
Enable Input -
Asserting this input energizes the motor shaft. A short
pulse (user-definable) on this input tells ClearPath to use the alternate
speed limit setting for the next move. (A "pulse" is a momentary
interruption of current into the Enable input.
Input A -
A transition on this input starts a move. You can define
whether the move starts on a rising or falling transition.
Input B -
Transitions on this input count up until they equal the count of
transitions seen on Input A, at which time ClearPath will ramp to a stop.
Output (HLFB) -
See HLFB section for available modes.
Notes:
•
This mode can also be used without homing if all the desired
stopping locations are equivalent (e.g., an indexing table with
four positions spaced an even 90 degrees apart).
MCPV
Available on







































































