





























C
L E A R
P
A T H
M C / S D
U
S E R
M
A N U A L
R
E V
.
3 . 0 9
1 1 5
T
EKNIC
,
I
NC
. T
EL
.
(585)
784-7454
M
ODE
C
ONTROLS
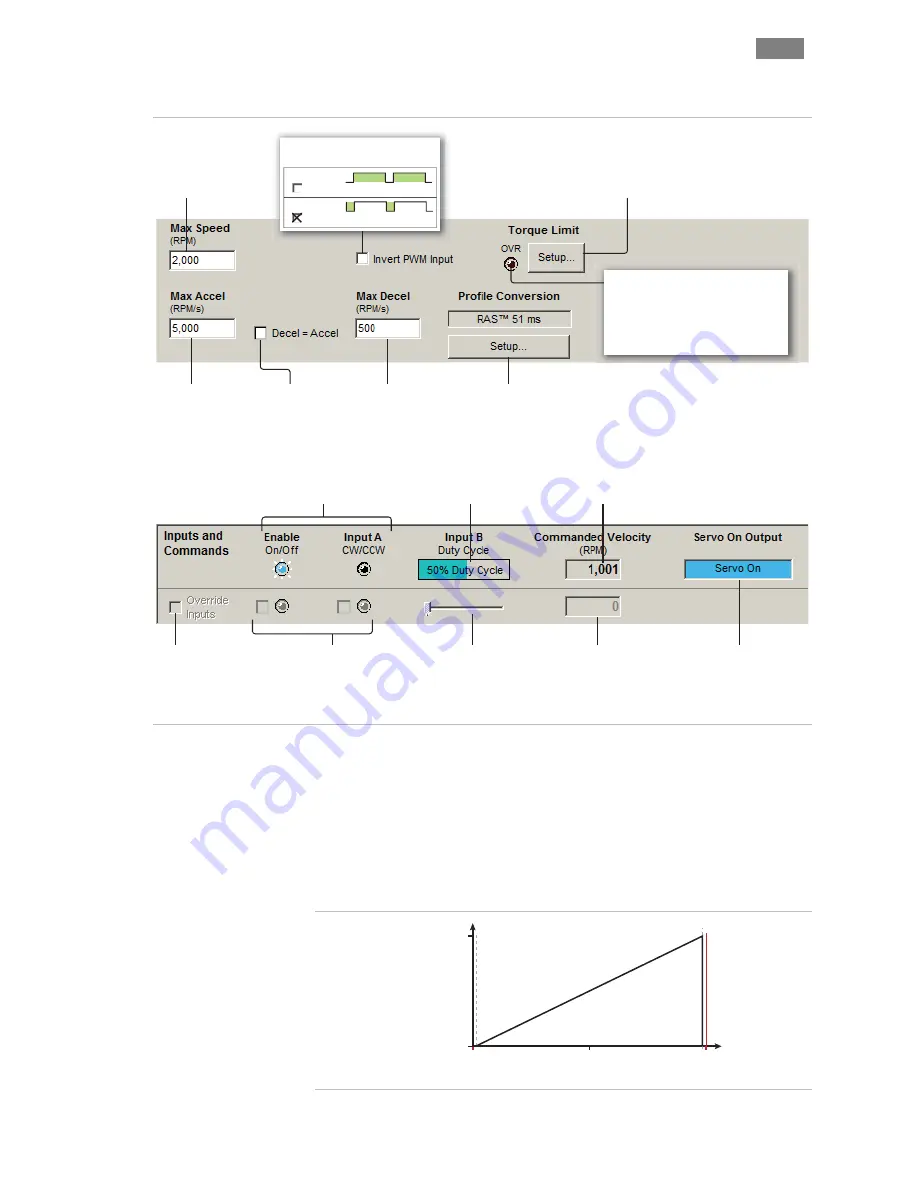
Enter maximum
desired motor
acceleration rate.
Check here to set
motor deceleration
rate to same value
as acceleration rate.
Soft Inputs and LEDs
Emulate hardware inputs. For
use only when Soft Controls
are active.
Caution: motor
may spin when enabled.
Enter maximum
desired motor
deceleration rate..
Displays commanded
velocity (when using
Soft Controls).
Displays commanded
velocity (when using
hard controls).
Hardware Input Status LEDs
Light = Input asserted (on)
Dark = Input de-asserted (off)
PWM Meter -
Displays
duty cycle of PWM source
connected to Input B.
PWM Soft Slider
Emulates PWM
input (for use with
Soft Controls).
Check to turn on Soft
Controls. Override cannot
be activated when ClearPath
is hardware enabled.
Displays HLFB
output status.
Adjust settings for
RAS
TM
(or optional
g-Stop
TM
) to convert standard trapezoidal
move profiles into profiles that reduce
noise, resonance, and vibration.
Torque Override Indicator
When lit, the main torque limit is being
overridden by a secondary, user-set torque
limit (e.g., when an axis is homing, the main
torque limit may be overridden by the
separate homing torque limit setting).
Check box to invert how PWM duty
cycle is measured by ClearPath.
NO CHECK
CHECK
Duty cycle is
% of period high
Duty cycle is
% of period low
Click to open
Torque Limit
Setup dialog.
Enter max. desired
motor speed (i.e.,
full scale speed).
Motor velocity vs. PWM duty cycle :
•
Motor velocity is proportional to PWM duty cycle (velocity
increases as duty cycle increases). See figure below.
•
In practice, 0% and 100% duty cycle signals (static low and
static high respectively) are invalid PWM states, interpreted by
ClearPath as “PWM turned off”. This is the equivalent of a zero-
velocity command.
0
50
100
PWM Duty Cycle (%)
Velocity
Max. Velocity
(user set)
0







































































