— 3-20 —
B
B
3
3
t
t
y
y
p
p
e
e
B
B
5
5
t
t
y
y
p
p
e
e
3.4. Turning on Main Power
3.4.3. Selection of Control I/O Signal Ports
2
2
3
3
t
t
y
y
p
p
e
e
2
2
5
5
t
t
y
y
p
p
e
e
3.4.3. Selection of Control I/O Signal Ports
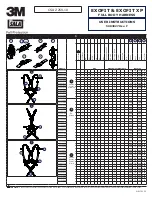
3.4.3.1. Selection of Input/Output Combination Type (CN2: B3 and 23 Driver Units)
l
ESBB5 and 25 Driver Units do not require this procedure.
1 Input port
l
For ESBB3 and 23 Driver Units you may change functions of some CN2 Input/Output signals.
(Combination types 1 to 4, 7, and 8 are available.)
l
Type 1 is the shipping set in case of the Megatorque Motor System.
l
The parameter TY selects a type of I/O signal combination. You need to enter the password for
inputting the parameter TY.
l
Input of the TY parameter will clear polarity of all input ports to the normally open contact.
(However, if you set the same parameter data to the TY parameter as before, the Driver Unit
maintains the current polarity setting.) Data indication of polarity (AB) is bit map format and its
order and relation between the TY and I/O combination type are listed on Table 3-6 below.
u
Selecting example
l
Set the I/O signal combination of connector CN2 to type 2.
(1) Input the password. The Driver Unit eccoes back the acknowledgement.
:/NSK ON
NSK ON
:_
K
N
S
/
SP
N
ENT
O
(2) Type the setting command “TY2.”
NSK ON
:TY2
ABX0X0XXXX
:_
ENT
Y 2
#
T
The display indicates that the polarity of all input ports is set to the normally open contact. (Refer to
“3.4.3.2. Polarity Setting of Input Port.”)
l
This completes the setting of TY2.
Содержание MEGATORQUE M-ESB-YSB2020AB300
Страница 2: ...MEGATORQUE MOTOR SYSTEM User s Manual ESB Driver Unit System EC T Document Number C20140 01 ...
Страница 7: ... Blank Page ...
Страница 11: ... iv Blank Page ...
Страница 295: ... 8 66 B B3 3 t ty yp pe e B B5 5 t ty yp pe e 8 2 Parameter List 2 23 3 t ty yp pe e 2 25 5 t ty yp pe e Blank page ...
Страница 355: ...1st Edition 1st Printing November 20 2003 Document Number C20140 01 ...