— 6-9 —
B
B
3
3
t
t
y
y
p
p
e
e
B
B
5
5
t
t
y
y
p
p
e
e
2
2
3
3
t
t
y
y
p
p
e
e
2
2
5
5
t
t
y
y
p
p
e
e
6.2. Position Control Mode Operation
6.2.1. Setting Home Position
2 Adjusting home limit sensor position and Home offset value
l
For an accurate Home Return, it requires position adjustment of the home limit sensor (a sensor
or a dog).
l
The home position will be set on the point at where the position counter becomes 0 after rises the
rising edge of HLS input signal is detected while the Motor is moving under “Near-Zero”
velocity. (When the parameter HO setting is a number other than 0, the home position is offset to
the MO setting from the above position.)
l
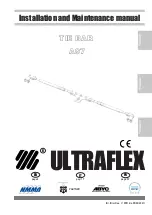
The position sensor has many teeth and the rising edge of HLS input signal is to identify a tooth
among those. Position adjustment of the limit sensor shall be made so that the position is on the
center of the tooth width for accurate identification. Design the position of the home limit sensor
so that it can be adjusted within ± 3.6°, which corresponds to the width of a tooth.
l
The following are the procedures for adjusting the home limit sensor.
u
Adjusting procedure: Adjusting position of the home limit sensor
1) Temporally set the limit sensor. The position shall be slightly preceding a point to be the home
position.
2) Check wiring of the home limit sensor. Check if the ESB Driver Unit is reading the HLS input
normally with execution of the IO command.
3) Adjust position of the home limit sensor. Turn the Motor servo on, and then execute HS/LS
command. Be careful when the Motor starts Home Return. Execute the procedures below using the
Handy Terminal.
(1) Execute HS/LS command.
:HS/LS_
L
S
/
H
S
(2) The Motor starts rotation by an input of the ENT key.
:HS/LS
TR8006
OK
:_
ENT
The Motor stops as soon as the home position limit is ON, and the TR (number of
pulses from the closest øZ signal) appears on the screen. Check if the value of TR is
within 4000 to 12000.
If it is not in the range loosen the position limit sensor and move it to CW or CCW
direction. Repeat (1) and (2) steps till the TR is within the range.
!
Caution: When the position of home limit sensor is used, be sure to adjust the TR
reading. Otherwise positioning may not be performed correctly.
Содержание MEGATORQUE M-ESB-YSB2020AB300
Страница 2: ...MEGATORQUE MOTOR SYSTEM User s Manual ESB Driver Unit System EC T Document Number C20140 01 ...
Страница 7: ... Blank Page ...
Страница 11: ... iv Blank Page ...
Страница 295: ... 8 66 B B3 3 t ty yp pe e B B5 5 t ty yp pe e 8 2 Parameter List 2 23 3 t ty yp pe e 2 25 5 t ty yp pe e Blank page ...
Страница 355: ...1st Edition 1st Printing November 20 2003 Document Number C20140 01 ...