





























— A-17 —
B
B
3
3
t
t
y
y
p
p
e
e
B
B
5
5
t
t
y
y
p
p
e
e
2
2
3
3
t
t
y
y
p
p
e
e
2
2
5
5
t
t
y
y
p
p
e
e
Appendix 4: How to Replace ESB Driver Unit
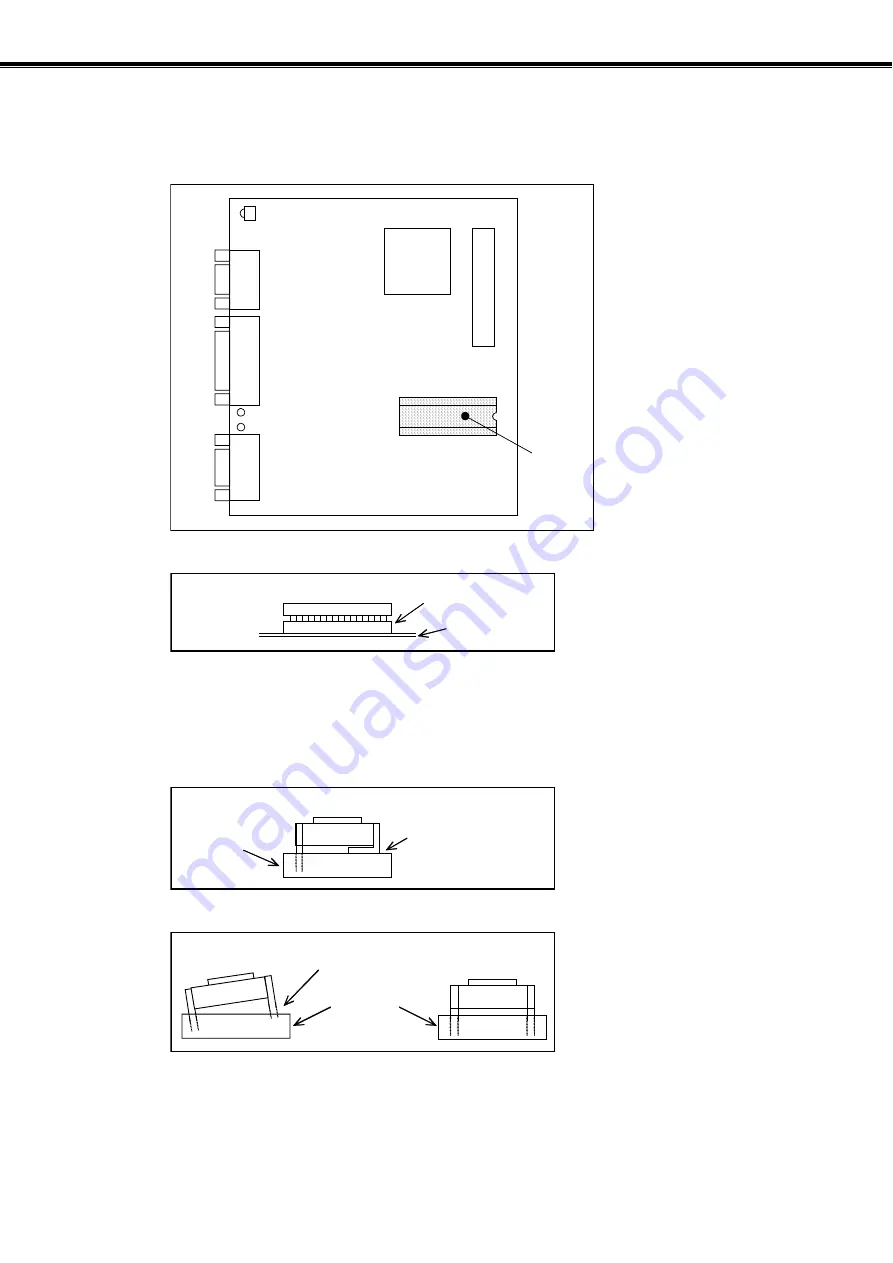
3. Remove U102 on the CB board with the ROM remover.
l
The B3, 23, B5, and 25 type Driver Units do not require the transfer of the ROM.
Figure A-17: Remove the U102 ROM.
U2
J3
Fr
ont sid
e of
Drver
Unit
U102
Figure A-18: Compensation ROM
U102
CB board
Socket
4. Transfer the removed compensation ROM to the new ESB Driver Unit.
l
When transferring the ROM, be careful for the orientation of the IC. Be sure to insert firmly the
ROM in the socket.
Figure A-19: Note 1: For inserting the ROM into the socket.
ROM
Be careful not to
break the pins.
Socket
Figure A-20: Note 2: For inserting the ROM into the socket.
ROM
Right position
Inclined
Socket
Содержание MEGATORQUE M-ESB-YSB2020AB300
Страница 2: ...MEGATORQUE MOTOR SYSTEM User s Manual ESB Driver Unit System EC T Document Number C20140 01 ...
Страница 7: ... Blank Page ...
Страница 11: ... iv Blank Page ...
Страница 295: ... 8 66 B B3 3 t ty yp pe e B B5 5 t ty yp pe e 8 2 Parameter List 2 23 3 t ty yp pe e 2 25 5 t ty yp pe e Blank page ...
Страница 355: ...1st Edition 1st Printing November 20 2003 Document Number C20140 01 ...





















































