— 6-27 —
B
B
3
3
t
t
y
y
p
p
e
e
B
B
5
5
t
t
y
y
p
p
e
e
2
2
3
3
t
t
y
y
p
p
e
e
2
2
5
5
t
t
y
y
p
p
e
e
6.2. Position Control Mode Operation
6.2.4. Jog
6.2.4. Jog
l
Jog function is available in TY2 or TY7 of Input/Output combination parameter TY of the B3 or
23 Driver Unit.
l
Put the Motor in Servo on state. (SVON input ON.)
l
Turning JOG input ON makes the Motor to rotate. The Motor keeps rotating while the JOG
input is ON. If it goes inactive, the Motor decelerates and then stops.
l
The Motor rotates in CW direction when the DIR input is OFF, and it rotates to CCW direction
while the DIR input is ON.
Table 6-11: List of parameter related to Jog operation
Item
RS-232C parameter
Unit
Data range
Initial setting
Jog acceleration
JA s
-2
0.01 to 1 280.00
1.00
Jog velocity
JV s
-1
0.0001 to 3.0000
0.1
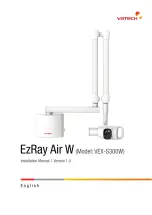
Figure 6-22: Signal timing of Jog operation
[Input]
SVON
JOG
DIR
[Motion]
Motor rotation
[Output]
IPOS
(
FW
£ 0
)
IPOS
(
FW > 0
)
Closed
Open
Closed
Open
ON
OFF
ON
OFF
JA
Velocity in CCW
Velocity in CW
JV
JA
JA
JV
MIN 30 msec
ON
OFF
!
Caution: When the DIR input is switched during rotation as shown in the above
chart, the Motor decelerates and reverses its motion.
Содержание MEGATORQUE M-ESB-YSB2020AB300
Страница 2: ...MEGATORQUE MOTOR SYSTEM User s Manual ESB Driver Unit System EC T Document Number C20140 01 ...
Страница 7: ... Blank Page ...
Страница 11: ... iv Blank Page ...
Страница 295: ... 8 66 B B3 3 t ty yp pe e B B5 5 t ty yp pe e 8 2 Parameter List 2 23 3 t ty yp pe e 2 25 5 t ty yp pe e Blank page ...
Страница 355: ...1st Edition 1st Printing November 20 2003 Document Number C20140 01 ...