


























Chapter 6 Function Introduction
Shenzhen Hpmont Technology Co., Ltd.
- 76 -
HD3N Series User Manual V1.1
Ref. code
Function Description
Setting Range [Default]
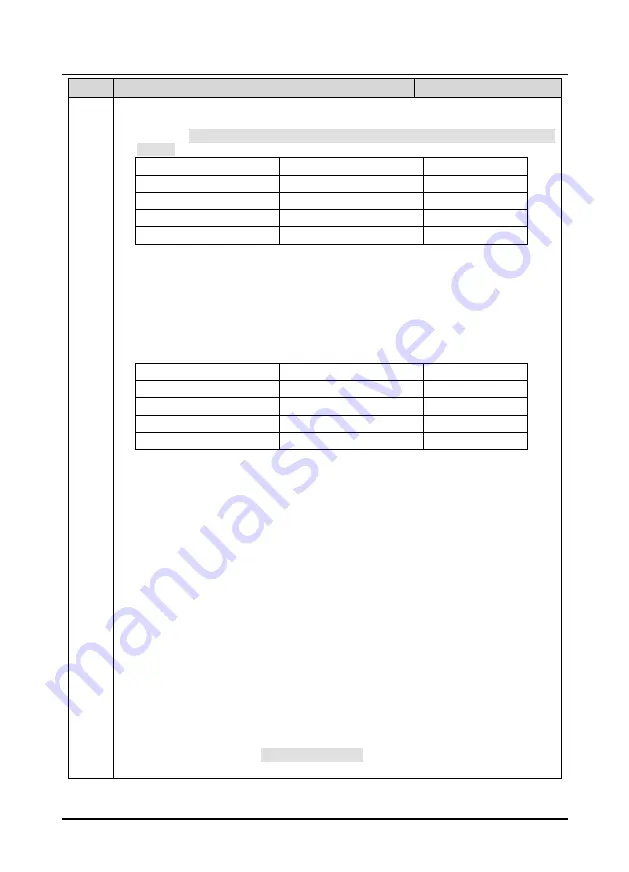
24,25: Jog 1 command and direction input.
•
Jog command in terminal control mode.JOGF is jog forward running and JOGR is jog reverse running.
•
Need define F00.15 (jog running frequency), F00.16 (jog interval, F03.15 (jog acc time) and F03.16 (jog
dec time):
Jog direction input (No. 25)
Jog command input (No. 24)
Running command
0
0
Invalid
1
0
Invalid
0
1
Jog 1 FWD
1
1
Jog 1 REV
Note: when No. 20 and 21 are selected, No. 24 and 25 are invalid.
26,27: Acc. / Dec. time terminal 1 and 2.
•
Priority of Acc. / Dec. time:
Acc. / Dec. time define by No. 26 and 27 of terminal > Acc. / Dec. time defined by F03.09 and F03.10.
•
By logic combination of Acc. / Dec. time terminal 1 and 2 can realize 4 sets of Acc. / Dec. time (as table
below).
•
4 groups time can be selected by setting 2 Acc. / Dec. terminals.
•
2 groups time can be selected by setting 1 terminals.
Acc. / Dec. terminal 2 (No 27)
Acc. / Dec. terminal 1(No 26)
Acc. / Dec. selection
0
0
Acc. / Dec. time 1
0
1
Acc. / Dec. time 2
1
0
Acc. / Dec. time 3
1
1
Acc. / Dec. time 4
28: Acc/dec mode selection.
•
When valid, select S curve mode; when invalid, select line mode.
•
Priority: Acc. / Dec. mode defined by No. 28 > Acc. / Dec. mode defined by F03.00.
29: Forbid Acc. / Dec.. motor maintain current running speed despite external signal (but stop).
•
Invalid when decelerates to stop.
30: Switch to normal run.
•
When valid, frequency commands (multi-speed, simple PLC, process PID, wobble function, etc.) are
switched to normal mode.
31: Reset infor PLC stop state reset.
•
When valid, clear the infor about PLC running phase, running time, running frequency. Refer to F06.
32: Pause process PID.
•
When valid, process PID function will pause, and HD3N continues running at present frequency.
33: Forbid process PID. Switch PID to other modes.
•
When valid, HD3N switches to other running modes.
•
Priority:
Jog running > Process PID > PLC > Wobble > Multi-speed > Normal run.
34: PID integral holding.
•
When valid, process PID stops integral accumulation, and the integrator keeps the current result.
35: Clear PID integral.
•
When valid, integrator clears PID ingetral.
36: Wobble mode. Wobble mode = manual (F07.01 units = 1).
•
When valid, enter wobble state.







































































