





























5-28
5
5. Manual Gain Tuning (Application)
Adjustment
Instantaneous Speed Observer
Outline
This function enables both realization of high response and reduction of vibration at stop
-
ping, by estimating the motor speed using a load model, hence improving the accuracy
of the speed detection.
Applicable Range
This function can be applicable only when the following conditions are satisfied.
Conditions under which the instantaneous speed observer is activated
Control mode
• Control mode to be either or both position control or/and velocity control.
Pr0.01 = 0 : Position control
Pr0.01 = 1 : Velocity control
Others
• Should be in servo-on condition
• Input signals such as the deviation counter clear and command input
inhibit, and parameters except for controls such as torque limit setup, are
correctly set, assuring that the motor can run smoothly.
• Real-time auto-tuning should be disabled. (Pr0.02=0)
Caution
This function does not work properly or no effect is obtained under the following condi
-
tions.
Conditions which obstruct instantaneous speed observer action
Load
• Gap between the estimated total load inertia (motor + load) and actual
machine is large.
e.g.) Large resonance point exists in frequency band of 300[Hz] or
below. Non-linear factor such as large backlash exists.
• Load inertia varies.
• Disturbance torque with harmonic component is applied.
Others
• Settling range is very small.
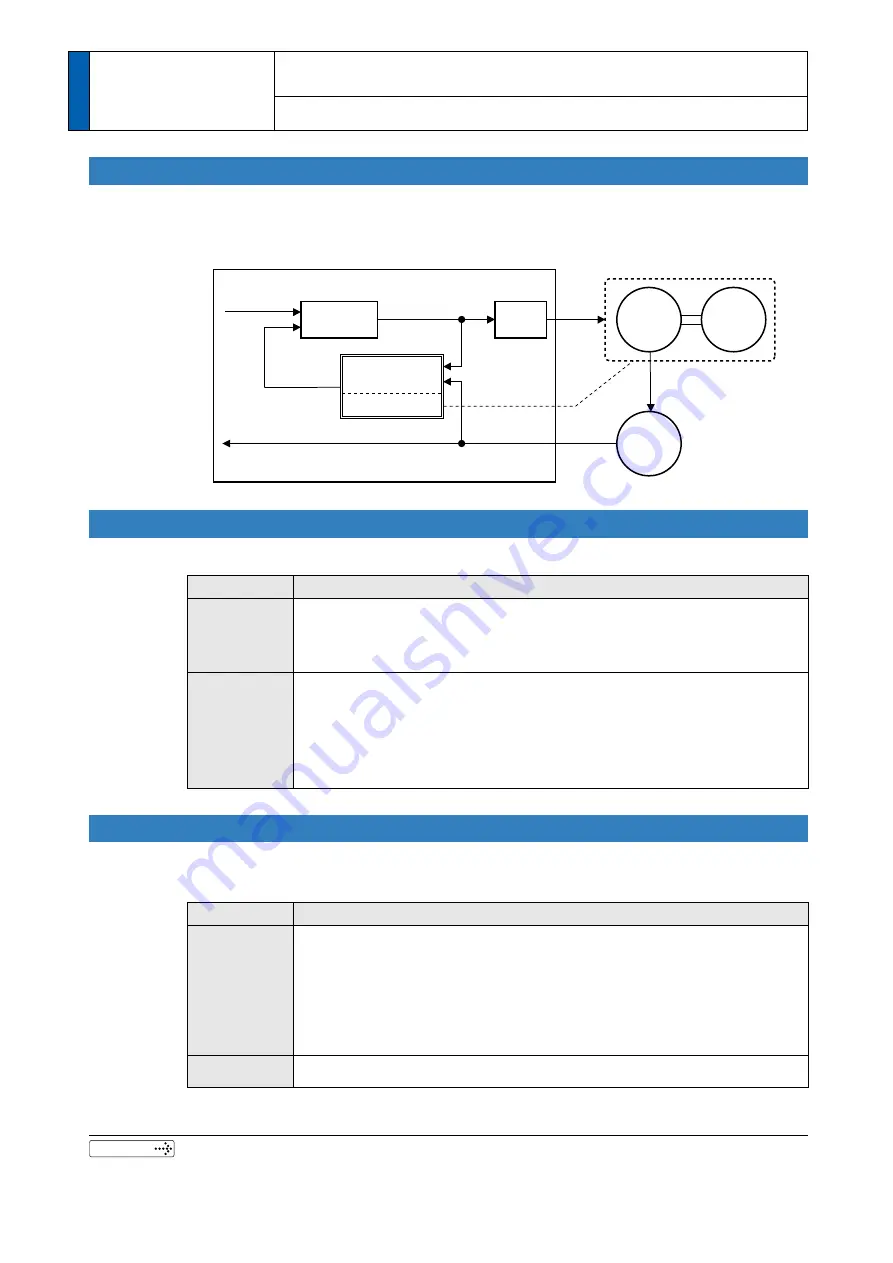
Current
control
Torque
command
Motor
current
Motor
Servo driver
Load
Encoder
Velocity
control
Velocity
command
Load model
Estimated
velocity
value
Position control
Motor
position
(Total inertia)
Instantaneous
speed observer
Related page
• P.4-52 “Details of parameter”
Summary of Contents for MINAS A5-series
Page 36: ...1 24 MEMO ...
Page 118: ...2 82 MEMO ...
Page 168: ...3 50 MEMO ...
Page 272: ...5 42 MEMO ...







































































