

























12. ABSOLUTE POSITION DETECTION SYSTEM
12 - 28
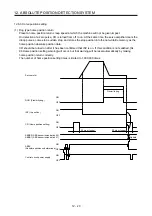
(c) At the time of alarm reset
If an alarm has occurred, detect ALM and turn off SON. After removing the alarm occurrence factor
and deactivating the alarm, get the absolute position data again from the servo amplifier in
accordance with the procedure in (a) in this section.
ON
95 ms
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
5 ms
Base circuit
Absolute position data
command transmission
Absolute position
data receive
Current position
Pulse train command
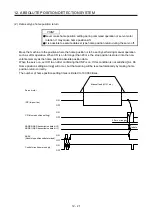
During this period, get absolute position data.
Current position change
SON
RES
ALM
RD
Absolute position
data
Summary of Contents for MR-J4-100A(-RJ)
Page 19: ...10 MEMO ...
Page 75: ...1 FUNCTIONS AND CONFIGURATION 1 56 MEMO ...
Page 83: ...2 INSTALLATION 2 8 MEMO ...
Page 159: ...3 SIGNALS AND WIRING 3 76 MEMO ...
Page 203: ...4 STARTUP 4 44 MEMO ...
Page 351: ...7 SPECIAL ADJUSTMENT FUNCTIONS 7 40 MEMO ...
Page 365: ...8 TROUBLESHOOTING 8 14 MEMO ...
Page 387: ...9 DIMENSIONS 9 22 MEMO ...
Page 403: ...10 CHARACTERISTICS 10 16 MEMO ...
Page 553: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 30 MEMO ...
Page 567: ...13 USING STO FUNCTION 13 14 MEMO ...
Page 607: ...14 COMMUNICATION FUNCTION MITSUBISHI ELECTRIC GENERAL PURPOSE AC SERVO PROTOCOL 14 40 MEMO ...
Page 639: ...15 USING A LINEAR SERVO MOTOR 15 32 MEMO ...
Page 767: ...18 MR J4 03A6 RJ SERVO AMPLIFIER 18 84 MEMO ...
Page 856: ...APPENDIX App 41 ...
Page 905: ...MEMO ...







































































