























19. MR-D01 EXTENSION I/O UNIT
19 - 21
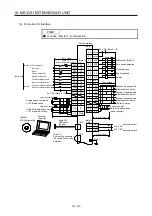
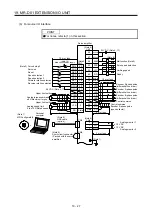
Note 1. To prevent an electric shock, always connect the protective earth (PE) terminal (marked ) of the servo amplifier to the
protective earth (PE) of the cabinet.
2. Connect the diode in the correct direction. If it is connected reversely, the servo amplifier will malfunction and will not output
signals, disabling EM2 (Forced stop 2) and other protective circuits.
3. The forced stop switch (normally closed contact) must be installed.
4. Supply 24 V DC ± 10% to interfaces from outside. The total current capacity of these power supplies must be 500 mA or lower.
500 mA is the value applicable when all I/O signals are used. The current capacity can be decreased by reducing the number
of I/O points. Refer to section 3.9.2 (1) that gives the current value necessary for the interface. A 24 V DC power supply can be
used for both input signal and output signal.
5. When starting operation, always turn on EM2 (Forced stop 2), LSP (Forward rotation stroke end) and LSN (Reverse rotation
stroke end). (Normally closed contact)
6.
ALM (Malfunction) turns on in normal alarm-free condition. (Normally closed contact)
7. The pins with the same signal name are connected in the servo amplifier.
8. TLA will be available when TL (External torque limit selection) is enabled with [Pr. PD03] to [Pr. PD22]. (Refer to section 3.6.1
(5).)
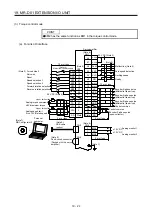
9. Use SW1DNC-MRC2-_. (Refer to section 11.7.)
10. Controllers or parameter units can also be connected via the CN3 connector with the RS-422/RS-485 communication. Note
that using the USB communication function (CN5 connector) prevents the RS-422/RS-485 communication function (CN3
connector) from being used, and vice versa. They cannot be used together.
PRU03
MR-PRU03
parameter unit
CN3
Servo amplifier
or
10BASE-T cable, etc. (EIA568-compliant)
RS-422/RS-485
compatible controller
11. When not using the STO function, attach the short-circuit connector came with a servo amplifier.
12. Configure a circuit to turn off EM2 when the main circuit power is turned off to prevent an unexpected restart of the servo
amplifier.
13. Plus and minus of the power of source interface are the opposite of those of sink interface.
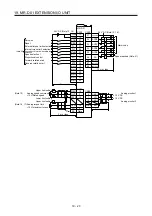
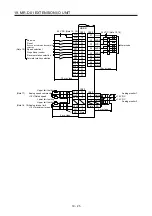
14. The devices can be changed by [Pr. PD03] to [Pr. PD14], [Pr. PD17] to [Pr. PD22], and [Pr. PD43] to [Pr. PD46].
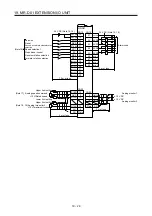
15. Supply 24 V DC ± 10% to interfaces of the MR-D01 from outside. The total current capacity of these power supplies must be
800 mA or lower. 800 mA is the value applicable when all I/O signals are used. The current capacity can be decreased by
reducing the number of I/O points. Refer to section 3.8.2 (1) that gives the current value necessary for the interface.
16.
As the 24 V DC for the input/output signals, one 24 V DC power supply can be used to supply to the servo amplifier and MR-
D01. In this case, select an appropriate power supply capacity depending on the number of points of the input/output signals to
be used.
17. The CN1-2 pin and CN20-2 pin are exclusive. The CN1-2 pin is set by default. Select this item with [Pr. Po11].
18. The CN1-27 pin and CN20-12 pin are exclusive. The CN1-27 pin is set by default. Select this item with [Pr. Po11].
19. OTLA will be available when TL (External torque limit selection) is enabled with [Pr. Po02] to [Pr. Po07], [Pr. Po27], and [Pr.
Po28]. (Refer to section 11.5.3 (6).)
20. The devices can be changed by [Pr. Po02] to [Pr. Po07].
21. The device can be changed by [Pr. Po08] and [Pr. Po09].
22. Output devices are not assigned by default. Assign the output devices with [Pr. PD47], [Pr. Po08], and [Pr. Po09] as
necessary.
23. Input devices are not assigned by default. Assign the input devices with [Pr. Po05], [Pr. Po06], [Pr. Po27], and [Pr. Po28] as
necessary.
Summary of Contents for MR-J4-100A(-RJ)
Page 19: ...10 MEMO ...
Page 75: ...1 FUNCTIONS AND CONFIGURATION 1 56 MEMO ...
Page 83: ...2 INSTALLATION 2 8 MEMO ...
Page 159: ...3 SIGNALS AND WIRING 3 76 MEMO ...
Page 203: ...4 STARTUP 4 44 MEMO ...
Page 351: ...7 SPECIAL ADJUSTMENT FUNCTIONS 7 40 MEMO ...
Page 365: ...8 TROUBLESHOOTING 8 14 MEMO ...
Page 387: ...9 DIMENSIONS 9 22 MEMO ...
Page 403: ...10 CHARACTERISTICS 10 16 MEMO ...
Page 553: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 30 MEMO ...
Page 567: ...13 USING STO FUNCTION 13 14 MEMO ...
Page 607: ...14 COMMUNICATION FUNCTION MITSUBISHI ELECTRIC GENERAL PURPOSE AC SERVO PROTOCOL 14 40 MEMO ...
Page 639: ...15 USING A LINEAR SERVO MOTOR 15 32 MEMO ...
Page 767: ...18 MR J4 03A6 RJ SERVO AMPLIFIER 18 84 MEMO ...
Page 856: ...APPENDIX App 41 ...
Page 905: ...MEMO ...





















































