



























5. PARAMETERS
5 - 28
No./symbol/
name
Setting
digit
Function
Initial
value
[unit]
Control
mode
P S T
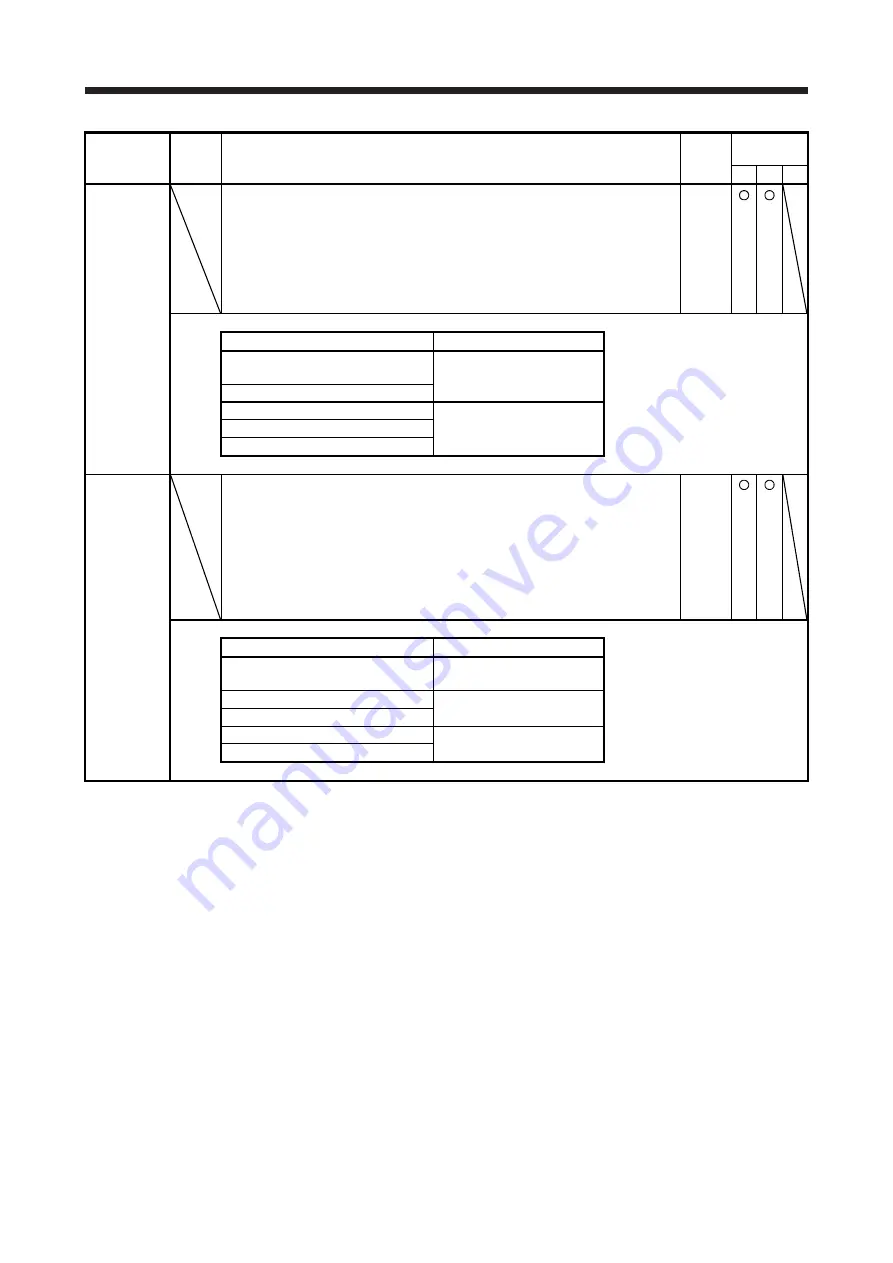
PB06
GD2
Load to motor
inertia ratio/
load to motor
mass ratio
Set the load to motor inertia ratio or load to motor mass ratio.
Setting a value considerably different from the actual load moment of inertia or load
mass may cause an unexpected operation such as an overshoot.
The setting of the parameter will be the automatic setting or manual setting
depending on the [Pr. PA08] setting. Refer to the following table for details. When
the parameter is automatic setting, the value will vary between 0.00 and 100.00.
Setting range: 0.00 to 300.00
7.00
[Multiplier]
Pr. PA08
This parameter
_ _ _ 0 (2 gain adjustment mode 1
(interpolation mode))
Automatic setting
_ _ _ 1: (Auto tuning mode 1)
_ _ _ 2: (Auto tuning mode 2)
Manual setting
_ _ _ 3 (Manual mode)
_ _ _ 4: (2 gain adjustment mode 2)
PB07
PG1
Model loop
gain
Set the response gain up to the target position.
Increasing the setting value will also increase the response level to the position
command but will be liable to generate vibration and noise.
For the vibration suppression control tuning mode, the setting range of [Pr. PB07] is
limited. Refer to section 7.1.5 (4) for details.
The setting of the parameter will be the automatic setting or manual setting
depending on the [Pr. PA08] setting. Refer to the following table for details.
Setting range: 1.0 to 2000.0
15.0
[rad/s]
Pr. PA08
This parameter
_ _ _ 0 (2 gain adjustment mode 1
(interpolation mode))
Manual setting
_ _ _ 1: (Auto tuning mode 1)
Automatic setting
_ _ _ 2: (Auto tuning mode 2)
_ _ _ 3 (Manual mode)
Manual setting
_ _ _ 4: (2 gain adjustment mode 2)
Summary of Contents for MR-J4-100A(-RJ)
Page 19: ...10 MEMO ...
Page 75: ...1 FUNCTIONS AND CONFIGURATION 1 56 MEMO ...
Page 83: ...2 INSTALLATION 2 8 MEMO ...
Page 159: ...3 SIGNALS AND WIRING 3 76 MEMO ...
Page 203: ...4 STARTUP 4 44 MEMO ...
Page 351: ...7 SPECIAL ADJUSTMENT FUNCTIONS 7 40 MEMO ...
Page 365: ...8 TROUBLESHOOTING 8 14 MEMO ...
Page 387: ...9 DIMENSIONS 9 22 MEMO ...
Page 403: ...10 CHARACTERISTICS 10 16 MEMO ...
Page 553: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 30 MEMO ...
Page 567: ...13 USING STO FUNCTION 13 14 MEMO ...
Page 607: ...14 COMMUNICATION FUNCTION MITSUBISHI ELECTRIC GENERAL PURPOSE AC SERVO PROTOCOL 14 40 MEMO ...
Page 639: ...15 USING A LINEAR SERVO MOTOR 15 32 MEMO ...
Page 767: ...18 MR J4 03A6 RJ SERVO AMPLIFIER 18 84 MEMO ...
Page 856: ...APPENDIX App 41 ...
Page 905: ...MEMO ...







































































