



















Chapter 7 - Options
7-8
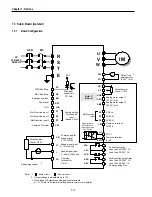
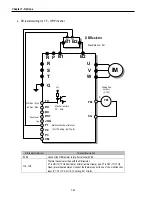
AOC
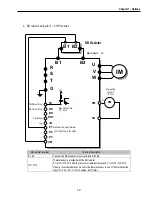
R
S
T
G
U
V
W
FX
RX
BX
RST
JOG
P1
P2
P3
CM
VR
V1
5G
IM
Motor
3
phase
AC
input
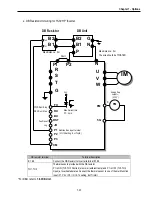
BOC
A+
A-
B+
B-
FBA
FBB
GND
E
Encoder
GND
+5V
+5V
VCC
VCC
Sub-B
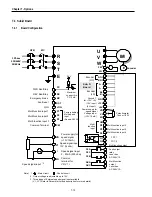
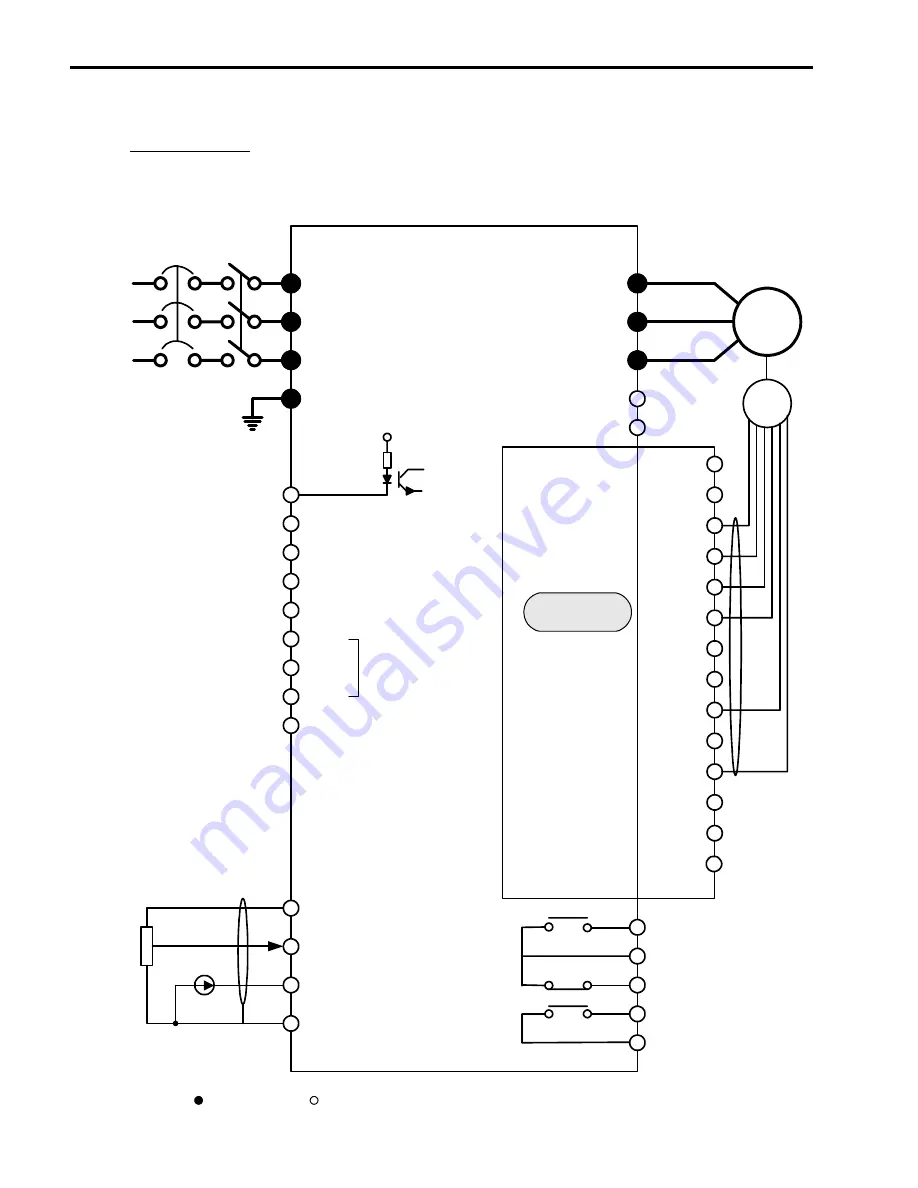
MC
NFC
FWD Run/Stop
REV Run/Stop
Emergency stop
Fault reset
JOG
I
Potentiometer
1 kohm, 1/2W
24 V
FM
5G
30A
30C
30B
AXA
AXC
Encoder
signal
(LD)
input
Encoder
signal
output
Encoder
signal
ground
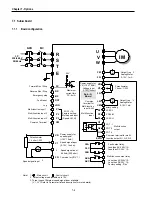
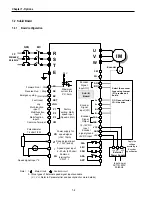
Note) 1. : Main circuit, : Control circuit.
2. External speed signal: V1, I, V1+I (Refer to Parameter list)
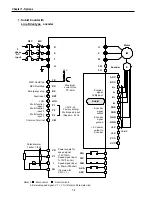
Shield
+5 V power
output to
Encoder
1. Sub-B board with
Line Drive type encoder
I/O-12~14 :
Factory setting:
Multi-speed input
(Speed-L, M, H)
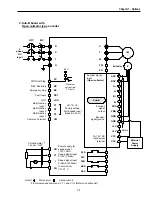
Common Terminal
Multi-function
input 1
Multi-function
input 2
Multi-function
input 3
Power supply for
speed signal
+12V 10mA
Speed signal input
0~10V(1 kohm)
Speed signal input
4~20mA (250ohm)
(Common for
VR, V1, I )
Maximum
current thru
PC: 5mA
Summary of Contents for 30 HP30
Page 6: ......
Page 12: ......
Page 16: ...Chapter 1 Installation 1 4 BLANK ...
Page 18: ...Chapter 1 Installation 1 6 BLANK ...
Page 28: ...Chapter 1 Installation 1 16 Notes ...
Page 39: ...Chapter 2 Operation 2 11 Notes ...
Page 40: ......
Page 46: ......
Page 60: ...Chapter 4 Operation Examples 4 14 Notes ...
Page 83: ...Chapter 5 Parameter List 5 23 Notes ...
Page 84: ......
Page 92: ...Chapter 6 Parameter Description DRV 6 8 Notes ...
Page 105: ......
Page 106: ...Chapter 6 Parameter description FU1 6 14 Notes ...
Page 126: ...Chapter 6 Parameter Description FU2 6 34 Notes ...
Page 144: ...Chapter 6 Parameter Description I O 6 52 Notes ...
Page 162: ......
Page 188: ...Chapter 7 Options 7 26 Type 1 Max 400 Watt Type 2 Max 600 Watt A ...
Page 189: ...Chapter 7 Options 7 27 Type 3 ...
Page 194: ......
Page 204: ......
Page 210: ......







































































