





























5.7 H: Terminal Functions
268
YASKAWA ELECTRIC
SIEP C710636 02B YASKAWA U1000 Technical Manual
Setting 6: Jog reference selection
The Jog frequency set in parameter d1-17 becomes the frequency reference when the input terminal closes.
Refer to
d1: Frequency Reference on page 231
for details.
Setting 7: Accel/decel time selection 1
Used to switch between accel/decel times 1 (C1-01 and C1-02) and 2 (C1-03 and C1-04).
Accel, Decel Times 1 to 4 on page 216
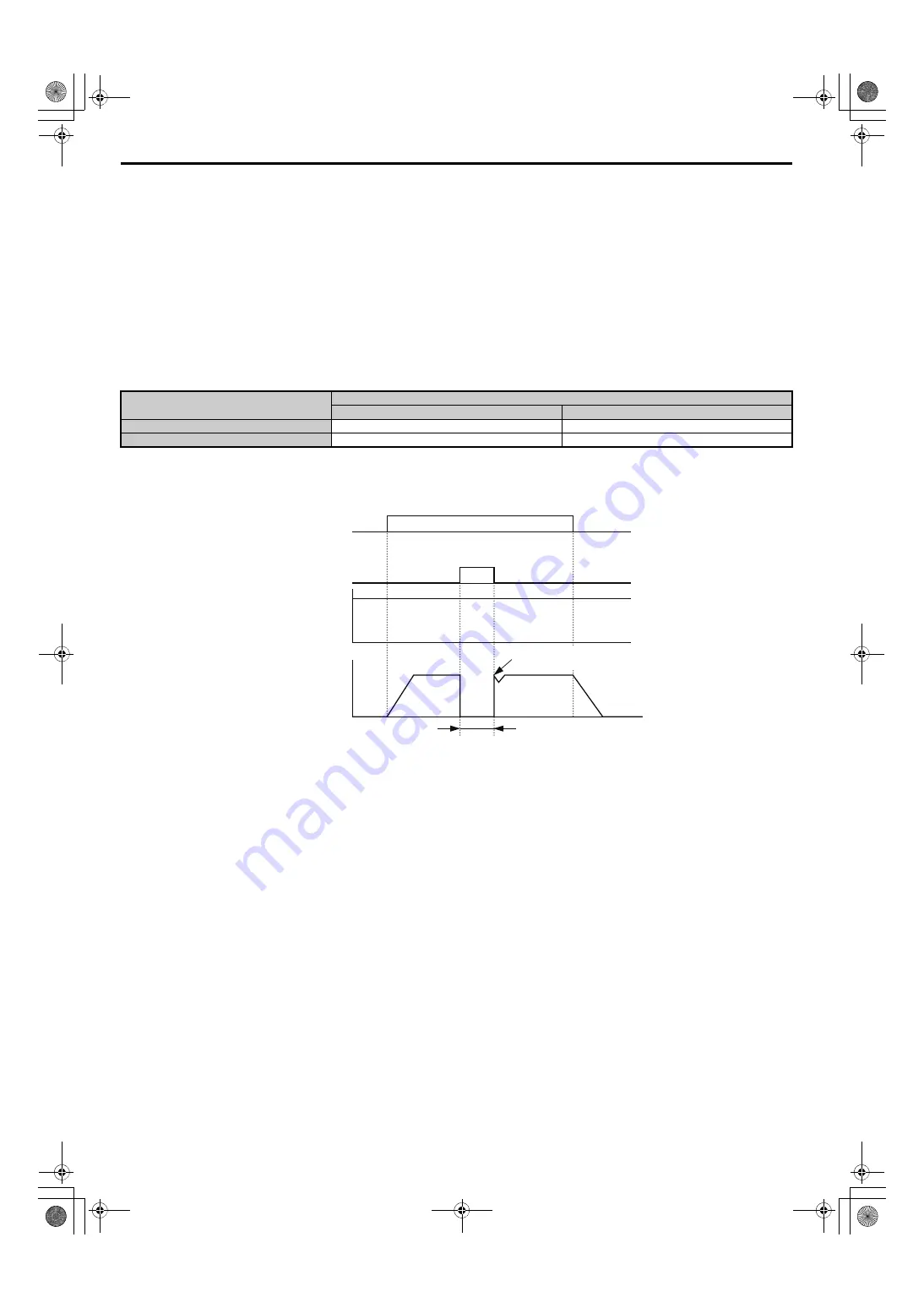
Setting 8, 9: Baseblock command (N.O., N.C.)
When the drive receives a Baseblock command, the output transistor stop switching and the motor coasts to stop. During
this time, the alarm “bb” will flash on the digital operator to indicate baseblock. When baseblock ends and a Run
command is active, the drive performs Speed Search to get the motor running again.
NOTICE:
If using baseblock in hoist applications, make sure the brake closes when the drive output is cut off by a Baseblock
command triggered via one of the input terminals. Failure to do so will result in the motor suddenly coasting when the Baseblock
command is entered, causing the load to slip.
Figure 5.58
Figure 5.58 Baseblock Operation During Run
Setting A: Accel/decel ramp hold
When the digital input programmed for the Accel/decel ramp hold function closes, the drive will lock (“hold”) the output
frequency. Acceleration or deceleration will resume once the input is opened again.
If the Accel/decel ramp hold function is enabled (d4-01 = 1), the drive will save the output frequency to memory
whenever the Ramp Hold input is closed. When the drive is restarted after stop or after power supply interruption, the
output frequency that was saved will become the frequency reference (provided that the Accel/decel ramp hold input is
still closed).
Refer to d4-01: Frequency Reference Hold Function Selection on page 234
for details.
Setting B: Drive overheat alarm (oH2)
Triggers an oH2 alarm when the contact closes. Because this is an alarm, drive operation is not affected.
Setting C: Analog terminal input selection (terminal A1, A2, A3)
When closed, the terminals specified in H3-14 are enabled. When open, the drive disregards the input signal to the analog
terminals.
Setting D: PG encoder disable
When closed the drive disregards PG feedback from the motor when using V/f Control with PG. When the terminal is
opened again, the drive resumes using PG feedback to control motor speed.
Setting E: ASR integral reset
Switches between PI control or simply P control by resetting the integral value. As long as the terminal is closed, integral
operation is disabled and the drive uses P control. When the terminal opens, PI control resumes.
Digital Input Function
Drive Operation
Input Open
Input Closed
Setting 9 (N.C.)
Baseblock (Interrupt output)
Normal operation
Setting 8 (N.O.)
Normal operation
Baseblock (Interrupt output)
Begin Speed Search from the
previous frequency reference
Run command
Baseblock input
Frequency
reference
Output frequency
OFF
ON
Output off, motor coasts
ON
Baseblock
release
SIEP_C710636_02B_1_0.book 268 ページ 2015年11月25日 水曜日 午後4時56分





















































