





























3 Safety-Related Functions
11.03
3.5 Safely-reduced speed (SG)
© Siemens AG 2003 All Rights Reserved
3-94
SINUMERIK 840D/SIMODRIVE 611 digital SINUMERIK Safety Integrated (FBSI) - Edition 11.03
3.5.1
Selecting/de-selecting the safely-reduced speed
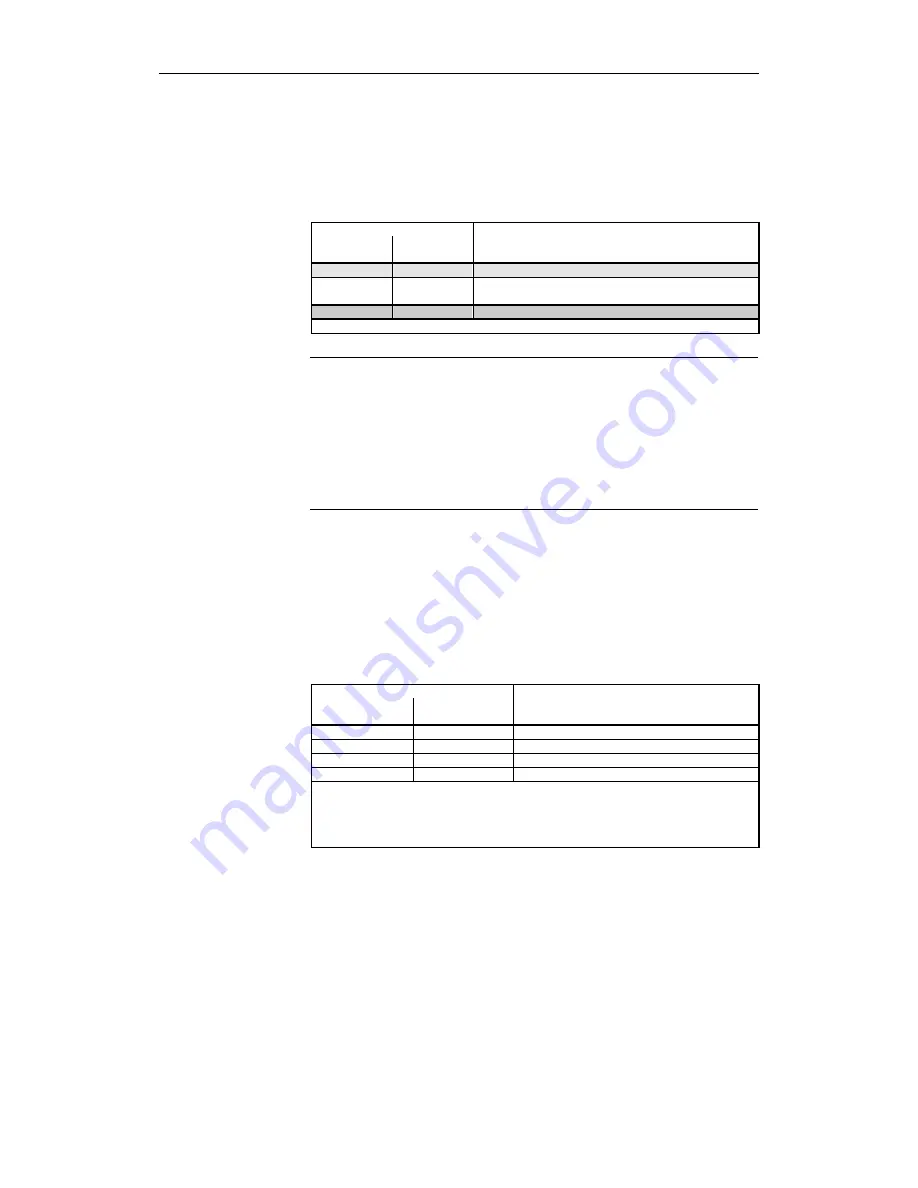
The following SGEs are used to select SG:
Table 3-22
Selecting/de-selecting SG
SGE
SBH/SG
de-selection
SBH
de-selection
Meaning
= 1
x
SBH and SG are de-selected
= 0
= 0
SBH is selected
(refer to Chapter 3, "Safe operating stop (SBH)")
= 0
= 1
SG is selected
Note: x
Æ
Any signal state
Note
The current status of the function is displayed using the SGA "SBH/SG
active" and SGA "SBH active".
Before the SG function is activated, it must be ensured that the speed of the
axis/spindle is lower than the selected speed limit value. If it is higher, an
alarm is generated that causes the drive to be shut down.
The SGEs and SGAs are described in Chapter 3.9, "Safety-relevant
input/output signals (SGE/SGA)".
The maximum permissible speed of an axis/spindle in the setting-up mode is
defined for individual machine types in the C Standards (product standards).
The machine manufacturer is responsible for ensuring that the correct speed
limit value is selected as a function of operating mode and application.
The required speed limit value is selected as follows by combining the following
SGEs:
Table 3-23
Selecting speed limit values for the SGs
SGE
SG selection
Bit 1
SG selection
Bit 0
Meaning
= 0
= 0
Speed limit value for SG1 active
= 0
= 1
Speed limit value for SG2 active
1)
= 1
= 0
Speed limit value for SG3 active
= 1
= 1
Speed limit value for SG4 active
1)
Note:
1) For SINUMERIK 840D system with SW 4.2 and higher, the SG limit value SG2 and
SG4 can be set in finer steps using the SG override (refer to Chapter 3.5.6, "Override
for safely-reduced speed").
The active SG stage is displayed via SGA "SGA active bit 0" and "SGA active bit 1".
The changeover from a lower to a higher speed limit value takes effect without
delay.
When changing-over from a higher to a lower limit value, then a delay time is
started that is parameterized using the machine data (refer to Fig. 3-6, "Timing
when changing over from a higher to a lower speed limit value).
Selecting SG
Selecting speed limit
values
Changing the speed
limit values







































































