





























11.03
3 Safety-Related Functions
3.4 Safe operating stop (SBH)
© Siemens AG 2003 All Rights Reserved
SINUMERIK 840D/SIMODRIVE 611 digital SINUMERIK Safety Integrated (FBSI) - Edition 11.03
3-87
Note
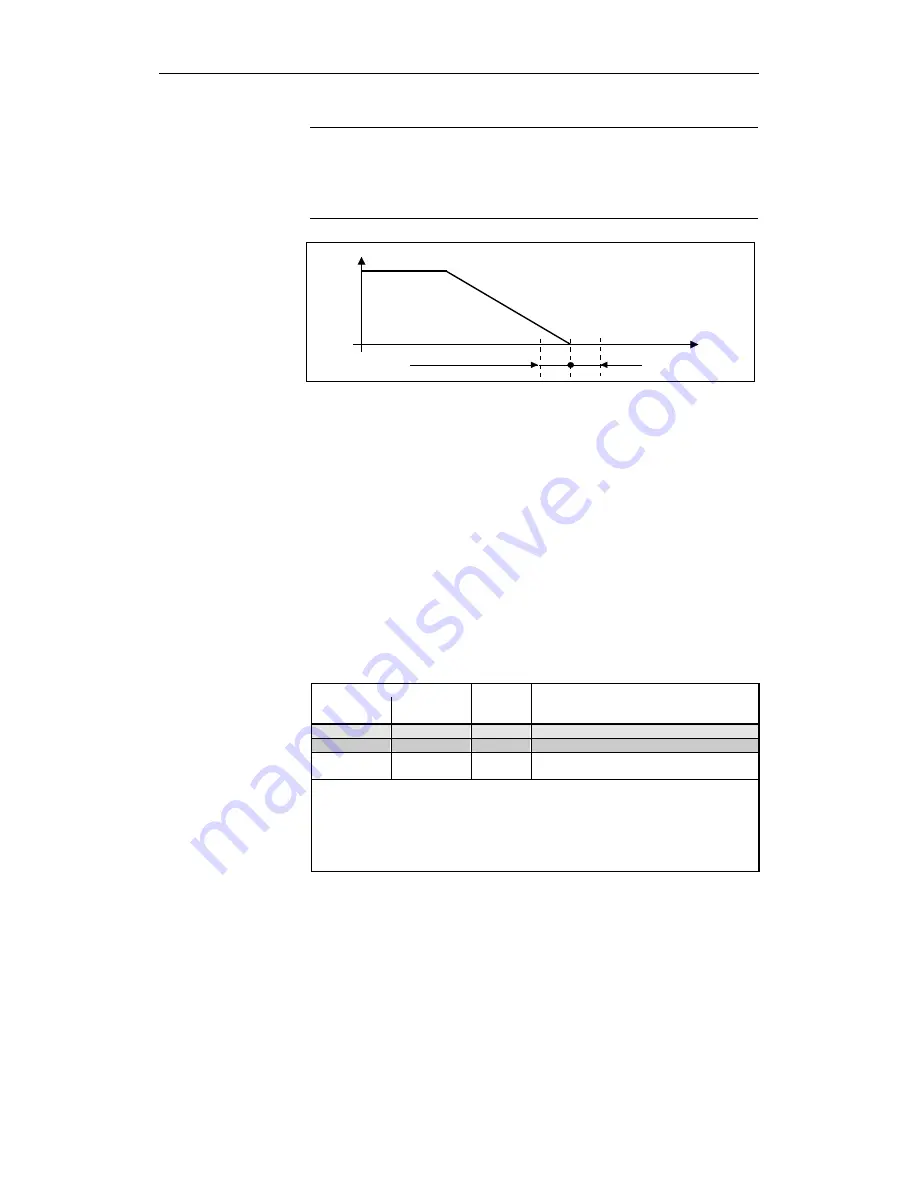
The size of the standstill tolerance window should be based on the standard
standstill (zero speed) monitoring limit and should exceed it slightly in either
direction. The standard monitoring functions in the control system are
otherwise rendered ineffective.
Standstill tolerance
Still_01.DS4
=
=
|v|
s
(Actual value)
Fig. 3-12
Standstill tolerance
The following prerequisites must be fulfilled (refer to Chapter 2.8, "System
requirements"):
•
The option and the function enable in the axis-specific machine data must
be present
•
The SGEs "SBH/SG de-selection" and "SBH de-selection" must be
supplied in the NCK and drive monitoring channels.
3.4.1
Selecting/de-selecting safe operating stop
The safe operating stop function is selected via the following SGEs:
Table 3-17
Selecting/de-selecting SBH
SGE SGA
SBH/SG
de-selection
SBH
de-selection
SBH
active
1)
Meaning
= 1
x
0
SBH and SG are de-selected
= 0
= 0
1
SBH is selected
= 0
= 1
0
SG is selected (refer to Chapter 3, "Safely-
reduced speed (SG)"),
Note:
840D from SW4.2
x
Æ
The signal state is as required
1) For SINUMERIK 840D, from SW4.2 onwards, the SG limit value SG2 and SG4 can
be finely graduated using the SG override (refer to Chapter 3.5.6, "Override for safely-
reduced speed".
The active SG stage is displayed via SGA "SGA active bit 0" and
"SGA active bit 1".
Prerequisites
Selecting SBH







































































