


























177
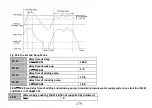
This is the second one of PID sleep mode, and it differs in the following two conditions (as showed in figure F8-6):
1
)
if feedback value is smaller than reference and larger than reference * (1 - set deviation
【
F8.14
】
), and output
frequency change rate is within 6%, the sleep mode is entered after delay time
【
F8.17
】
.
2
)
if feedback value increases to above reference value, the sleep mode is entered after delay time
【
F8.17
】
; otherwise,
if the feedback value decreases to under wake-up threshold
【
F8.16
】
, it will wake up immediately.
F8.13
Stop method of sleep mode
0
~
1
0
0
:
decelerate to stop
1
:
coast to stop
F8.14
Deviation limit of feedback when entering sleep state
compared with set pressure
0.0
~
20.0%
0.5%
This function parameter is only valid to the second sleep mode.
F8.15
Threshold value of sleep
0.00
~
200.0%
100.0%
This threshold value is the percentage of set pressure value. This parameter is only valid to the first sleep mode.
F8.16
Threshold value of wake-up
0.00
~
200.0%
90.0%
F8.15 defines the feedback value when the driver is entering sleep mode. If the actual feedback is larger than this set
value, and the output frequency arrives at lower limit, the driver will enter sleep mode (zero speed operation) after delay
time defined by F8.17.
F8.16 defines the feedback limit when the driver is entering operating state from sleep mode. When PID selects positive
characteristic and the the actual feedback is smaller than this set value (or when PID selects negative characteristic and







































































