


























174
0.01
~
10.00s
0.05
F8.07
Derivative time Td1
0.01
~
10.00s
0.00
0.00
:
no derivative regulation
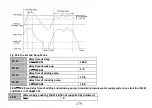
Proportional gain (Kp):
It determines the adjusting strength of PID regulator. The larger of P, the larger of adjusting strength. But excessive
adjusting strength will result in fluctuation easily.
When feedback and reference shows deviation, regulating value that is in proportion to deviation is output. If the
deviation is constant, the regulating value is constant. Proportion regulation can response quickly to the feedback
changing, but can’t realize floating control alone. The larger of the proportional gain, the quicker of the regulating speed,
which may result in fluctuation. The regulating method is as follows: set integral time a large value and derivative time
zero, use proportion regulation alone to operate the system, check the steady deviation (offset) of feedback signal and
reference when modifying the reference. If the offset is in the same direction of reference changing (for example,
increase the reference, and the feedback value is always smaller than reference after the system became stable);
otherwise, decrease proportional gain and repeat the process above until the offset reaching a quite small value.
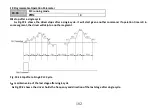
Integral time (Ti):
It determines the speed of integral regulation.
When feedback shows deviation with reference, output regulation value increases continuously. If the deviation exists
continuously, the regulation value will stay increasing until no deviation. The integral regulator can eliminate offset
effectively, but being too strong can result in repeating overshoot and cause fluctuation to system. The adjustment of
integral time parameter usually goes in descending order with observation of the effect at the same time until a steady
speed fulfilling requirement is reached.
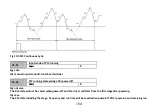
Derivative time
(
Td
)
:
It determines the adjustment intensity of deviation changing rate.
When the deviation is changing, regulation value in proportion to deviation changing rate is output. This regulation value
is only relevant to the direction and value of deviation change, not of the deviation itself. Derivative regulation is
processed according to variation trend when feedback signal is changing so as to suppress the change. Please be cautious
to use it, because it will amplify interference of system easily, especially those whose changing frequency is relatively







































































