

























11
Id.-Nr.: 1556.212.1-07
System overview
3.1
Hardware architecture
Devices are connected according to their signal type, e.g. via analog or digital input
or output modules, interface modules, etc.
For greater distances between the transducers a decentralized groups of IO module
clusters can be used. These can be connected with the CPU module via bus link
modules.
All modules must be integrated into a control cabinet. Their enclosure only provides
mechanical protection; the EMC shielding happens inside the device. For greater dis-
tances between the transducers a decentralized groups of IO module clusters can be
used. These can be connected with the CPU module via bus link modules.
The operating and display devices can be arranged at a suitable location somewhere
on the machine/plant.
During the start of the system, the runtime system compares the current hardware
configuration (actual configuration) with the hardware configuration (set configuration
saved in the MotionCenter project. Deviations in configuration or faulty modules can
be identified via the inquiry of the module status in the IEC application. The response
is set here via the program (e.g. error output on the visualization, restricted function
in the optional I/O modules, etc.)
3.2
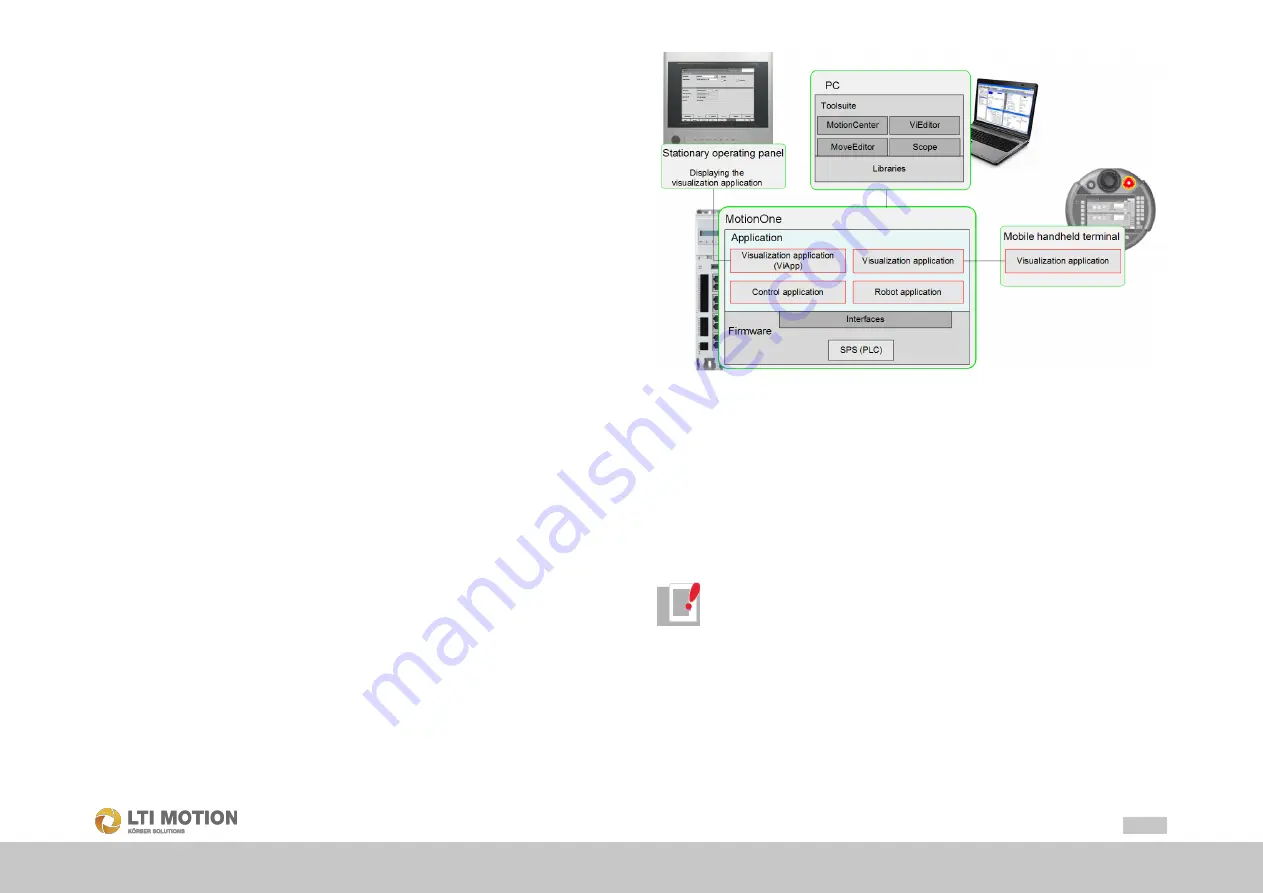
Software architecture
The following graphic shows the software structure of the MotionOne 3 system.
Fig. 3.2:
SW overview
The control application, the robot application and the visualization application of the
stationary operating panel are executed on the control. Libraries and interfaces are
available to access the control programmatically.
The visualization application TeachView is executed on the mobile handheld terminal
(VOpanel-M) . This allows a robot program to be created or taught online.
The tool suite is installed on a PC. The programs are used for parameterization, pro-
gramming, and diagnostics.
The control software is based on a Debian (Linux) operating system with customized
scope.
Information
The version number of your MotionOne 3 system can be found in the sup-
plied release notes!
The following runtime systems operate in parallel on the control:
IecRT
The used runtime system corresponds to the IEC 61131-3 standard. The following
topics are covered:







































































