





























User Manual of EM730/EM730E Series Inverter
222
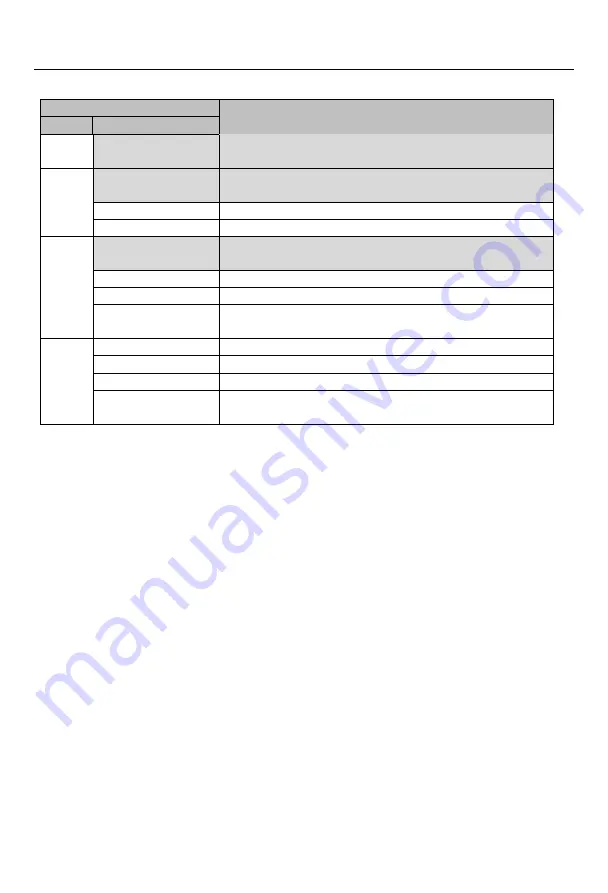
Table 7-15 Description of PID Parameter Options
Method
Description
F09.11
Other conditions
0
--
PID parameters are not switched. The first group of
parameters is used.
1
43: PID parameter
switching
PID parameters are switched via the digital input terminal
(43: PID parameter switching).
0
Invalid switching, the first group of parameters
1
Valid switching, the second group of parameters
2
|e
(
k
)
| - F09.12/13 PID parameters are automatically switched according to the
deviation.
|e(k)|< F09.12
The first group of parameters
|e(k)|< F09.13
The second group of parameters
Middle
According to the deviation, linear interpolation is performed
based on the two groups of parameters.
3
|P|~F09.12/13
PID parameters are automatically switched by frequency.
|P|< F09.12
The first group of parameters
|P|> F09.13
The second group of parameters
Middle
According to the frequency, linear interpolation is
performed based on the two groups of parameters.
As described in the table, when the function code F09.11 is set to 0, the PID parameters
will not be switched, and the first group of parameters (F09.05 to F09.07) will prevail; when the
function code is set to 1, the PID parameters will be selected according to the status of the input
function “43: PID parameter switching”; when the function code 2 is used, the PID parameters
will be selected according to the absolute value |e(k)| (=|setting-feedback|) of the current
deviation and the relationship between the function codes F09.12 and F09.13, or the linear
difference may be used; when the function code 3 is used, processing is similar to that of the
option 2, the PID parameters will be selected according to the percentage of the current output
frequency to maximum frequency |P| = (output frequency/maximum frequency * 100%) and the
relationship between the function codes F09.12 and F09.13, or the linear difference may be
used.
In the case of “F09.12≤|e(k)|≤F09.13”, the current PID parameters are obtained through
linear interpolation of the first and second groups of parameters. The specific principle is shown
by the intermediate segment in Fig. 9-28





















































