








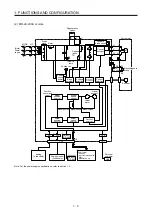




















1. FUNCTIONS AND CONFIGURATION
1 - 8
Function Description
Detailed
explanation
Output signal selection
(device settings)
The output devices including MBR (Electromagnetic brake interlock) can be assigned
to certain pins of the CN1 connector.
[Pr. PD24] to
[Pr. PD28]
Output signal (DO) forced
output
Output signal can be forced on/off independently of the servo status.
Use this function for checking output signal wiring, etc.
Section 4.5.8
Command pulse selection
Command pulse train form can be selected from among three different types.
[Pr. PA13]
Torque limit
Servo motor torque can be limited to any value.
Section 3.6.1
(5)
[Pr. PA11]
[Pr. PA12]
Speed limit
Servo motor speed can be limited to any value.
Section 3.6.3
(3)
[Pr. PC05] to
[Pr. PC11]
Status display
Servo status is shown on the 5-digit, 7-segment LED display.
Section 4.5.3
External I/O signal display
On/off statuses of external I/O signals are shown on the display.
Section 4.5.7
Automatic VC offset
Voltage is automatically offset to stop the servo motor if it does not come to a stop
when VC (Analog speed command) or VLA (Analog speed limit is 0 V.
Section 4.5.4
Alarm code output
If an alarm has occurred, the corresponding alarm number is outputted in 3-bit code.
Chapter 8
Test operation mode
Jog operation, positioning operation, motor-less operation, DO forced output, and
program operation
MR Configurator2 is required for the positioning operation and program operation.
Section 4.5.9
Analog monitor output
Servo status is outputted in terms of voltage in real time.
[Pr. PC14],
[Pr. PC15]
MR Configurator2
Using a personal computer, you can perform the parameter setting, test operation,
monitoring, and others.
Section 11.4
One-touch tuning
Gain adjustment is performed just by one click on a certain button on MR
Configurator2 or operation section.
Section 6.2
Tough drive function
This function makes the equipment continue operating even under the condition that
an alarm occurs.
The tough drive function includes two types: the vibration tough drive and the
instantaneous power failure tough drive.
Section 7.3
Drive recorder function
This function continuously monitors the servo status and records the status transition
before and after an alarm for a fixed period of time. You can check the recorded data
on the drive recorder window on MR Configurator2 by clicking the "Graph" button.
However, the drive recorder will not operate on the following conditions.
1. You are using the graph function of MR Configurator2.
2. You are using the machine analyzer function.
3. [Pr. PF21] is set to "-1".
[Pr. PA23]
Servo amplifier life diagnosis
function
You can check the cumulative energization time and the number of on/off times of the
inrush relay. This function gives an indication of the replacement time for parts of the
servo amplifier including a capacitor and a relay before they malfunction.
MR Configurator2 is necessary for this function.
Power monitoring function
This function calculates the power running energy and the regenerative power from
the data in the servo amplifier such as speed and current. Power consumption and
others are displayed on MR Configurator2.
Machine diagnosis function
From the data in the servo amplifier, this function estimates the friction and vibrational
component of the drive system in the equipment and recognizes an error in the
machine parts, including a ball screw and bearing.
MR Configurator2 is necessary for this function.
Lost motion compensation
function
This function improves the response delay occurred when the machine moving
direction is reversed. This is used with servo amplifiers with software version C5 or
later. Check the software version of the servo amplifier using MR Configurator2.
Section 7.5
Modbus RTU communication
function
The Modbus protocol uses dedicated message frames for the serial communication
between a master and slaves. The dedicated message frames have functions for
reading and writing data, and users can write parameters from servo amplifiers and
check the operation status of the servo amplifiers by using this function.
MR-JE-_A
Servo
Amplifier
Instruction
Manual
(Modbus RTU
Protocol)
Summary of Contents for MR-JE-_A
Page 9: ...A 8 MEMO ...
Page 15: ...6 MEMO ...
Page 29: ...1 FUNCTIONS AND CONFIGURATION 1 14 MEMO ...
Page 139: ...4 STARTUP 4 38 MEMO ...
Page 187: ...5 PARAMETERS 5 48 MEMO ...
Page 221: ...6 NORMAL GAIN ADJUSTMENT 6 34 MEMO ...
Page 259: ...8 TROUBLESHOOTING 8 8 MEMO ...
Page 265: ...9 DIMENSIONS 9 6 MEMO ...
Page 273: ...10 CHARACTERISTICS 10 8 MEMO ...
Page 339: ...12 COMMUNICATION FUNCTION MITSUBISHI ELECTRIC GENERAL PURPOSE AC SERVO PROTOCOL 12 34 MEMO ...







































































