












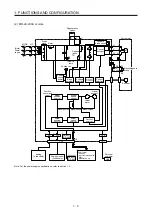
















1. FUNCTIONS AND CONFIGURATION
1 - 4
1.3 Servo amplifier standard specifications
Model:
MR-JE-
10A 20A 40A 70A 100A 200A
300A
Output
Rated voltage
3-phase 170 V AC
Rated
current
[A]
1.1 1.5 2.8 5.8 6.0 11.0
11.0
Power supply
input
Voltage/Frequency
3-phase or 1-phase 200 V AC to 240 V AC, 50
Hz/60 Hz
3-phase or 1-phase
200 V AC to 240 V AC,
50 Hz/60 Hz (Note 6)
3-phase
200 V AC to
240 V AC,
50 Hz/60 Hz
Rated current
(Note 5)
[A]
0.9 1.5 2.6 3.8 5.0 10.5
14.0
Permissible voltage
fluctuation
3-phase or 1-phase 170 V AC to 264 V AC
3-phase or 1-phase
170 V AC to 264 V AC
(Note 6)
3-phase
170 V AC to
264 V AC
Permissible frequency
fluctuation
Within
±5%
Power supply capacity
[kVA]
Refer to section 10.2.
Inrush current
[A]
Refer to section 10.5.
Interface
power supply
Voltage
24 V DC ± 10%
Current capacity
[A]
0.3 (Note 1)
Control method
Sine-wave PWM control, current control method
Dynamic
brake
Built-in
Communication function
USB: connection to a personal computer or others (MR Configurator2-compatible)
RS-422/RS-485: Connection to controller (1: n communication up to 32 axes) (Note 4, 7)
Encoder output pulses
Compatible (A/B/Z-phase pulse)
Analog monitor
Two channels
Position
control mode
Max. input pulse
frequency
4 Mpulses/s (for differential receiver) (Note 3), 200 kpulses/s (for open collector)
Positioning feedback
pulse
Encoder resolution (resolution per servo motor revolution): 131072 pulses/rev
Command pulse
multiplying factor
Electronic gear A:1 to 16777215, B:1 to 16777215, 1/10 < A/B < 4000
In-position range
setting
0 pulse to ±65535 pulses (command pulse unit)
Error excessive
±3 revolutions
Torque limit
Set by parameter setting or external analog input (0 V DC to +10 V DC/maximum torque)
Speed control
mode
Speed control range
Analog speed command 1: 2000, internal speed command 1: 5000
Analog speed
command input
0 to ±10 V DC/rated speed (The speed at 10 V is changeable with [Pr. PC12].)
Speed fluctuation ratio
±0.01% or less (load fluctuation 0% to 100%), 0% (power fluctuation ±10%), ±0.2% or less
(ambient temperature 25 °C ± 10 °C) when using analog speed command
Torque limit
Set by parameter setting or external analog input (0 V DC to +10 V DC/maximum torque)
Torque
control mode
Analog torque
command input
0 V DC to ±8 V DC/maximum torque (input impedance 10 k
Ω
to 12 k
Ω
)
Speed limit
Set by parameter setting or external analog input (0 V DC to 10 V DC/rated speed)
Positioning mode
Refer to section 1.1 of "MR-JE-_A Servo Amplifier Instruction Manual (Positioning Mode)"
The positioning mode is available with servo amplifiers with software version B7 or later.
Protective functions
Overcurrent shut-off, regenerative overvoltage shut-off, overload shut-off (electronic thermal),
servo motor overheat protection, encoder error protection, regenerative error protection,
undervoltage protection, instantaneous power failure protection, overspeed protection, and
error excessive protection
Compliance
with global
standards
CE marking
LVD: EN 61800-5-1
EMC: EN 61800-3
UL standard
UL 508C
Structure (IP rating)
Natural cooling, open (IP20)
Force cooling, open
(IP20)
Close
mounting
(Note 2)
3-phase power supply
input
Possible
1-phase power supply
input
Possible Impossible
Summary of Contents for MR-JE-_A
Page 9: ...A 8 MEMO ...
Page 15: ...6 MEMO ...
Page 29: ...1 FUNCTIONS AND CONFIGURATION 1 14 MEMO ...
Page 139: ...4 STARTUP 4 38 MEMO ...
Page 187: ...5 PARAMETERS 5 48 MEMO ...
Page 221: ...6 NORMAL GAIN ADJUSTMENT 6 34 MEMO ...
Page 259: ...8 TROUBLESHOOTING 8 8 MEMO ...
Page 265: ...9 DIMENSIONS 9 6 MEMO ...
Page 273: ...10 CHARACTERISTICS 10 8 MEMO ...
Page 339: ...12 COMMUNICATION FUNCTION MITSUBISHI ELECTRIC GENERAL PURPOSE AC SERVO PROTOCOL 12 34 MEMO ...







































































