




























5. PARAMETERS
5 - 45
No./symbol/
name
Setting
digit
Function
Initial
value
[unit]
Control mode
P S T
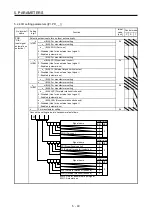
PD46
*DI12H
Input device
selection 12H
Any input device can be assigned to the CN1-35 pin and the CN1-38 pin.
When "00" is set, NP/NP2 (Reverse rotation pulse/Manual pulse generator) will be assigned.
The CN1-38 pin is available with servo amplifiers having software version B7 or later, and manufactured in May 2015
or later.
This parameter is available with servo amplifiers with software version B7 or later.
_ _ x x Torque control mode - Device selection
Refer to table 5.9 in [Pr. PD03] for settings.
00h
x x _ _ For manufacturer setting
2Bh
5.2.5 Extension setting 2 parameters ([Pr. PE_ _ ])
No./symbol/
name
Setting
digit
Function
Initial
value
[unit]
Control mode
P S T
PE41
EOP3
Function
selection E-3
_ _ _ x Robust filter selection
0: Disabled
1: Enabled
When you select "Enabled" of this digit, the machine resonance suppression filter 5
set in [Pr. PB51] is not available.
0h
_ _ x _ For manufacturer setting
0h
_ x _ _
0h
x _ _ _
0h
PE44
LMCP
Lost motion
compensation
positive-side
compensation
value
selection
Set the lost motion compensation for when reverse rotation (CW) switches to
forward rotation (CCW) in increments of 0.01% assuming the rated torque as 100%.
This parameter is available with servo amplifiers with software version C5 or later.
Setting range: 0 to 30000
0
[0.01%]
PE45
LMCN
Lost motion
compensation
negative-side
compensation
value
selection
Set the lost motion compensation for when forward rotation (CCW) switches to
reverse rotation (CW) in increments of 0.01% assuming the rated torque as 100%.
This parameter is available with servo amplifiers with software version C5 or later.
Setting range: 0 to 30000
0
[0.01%]
PE46
LMFLT
Lost motion
filter setting
Set the time constant of the lost motion compensation filter in increments of 0.1 ms.
If the time constant is set to "0", the torque is compensated with the value set in [Pr.
PE44] and [Pr. PE45]. If the time constant is set to other than "0", the torque is
compensated with the high-pass filter output value of the set time constant, and the
lost motion compensation will continue.
This parameter is available with servo amplifiers with software version C5 or later.
Setting range: 0 to 30000
0
[0.1 ms]
PE47
TOF
Torque offset
Set this when canceling unbalanced torque of vertical axis. Set this assuming the
rated torque of the servo motor as 100%.
The torque offset does not need to be set for a machine not generating unbalanced
torque.
The torque offset set with this parameter will be enabled in the position control
mode, speed control mode, and torque control mode. Input commands assuming
torque offset for the torque control mode.
This parameter is available with servo amplifiers with software version C5 or later.
Setting range: -10000 to 10000
0
[0.01%]
Summary of Contents for MR-JE-_A
Page 9: ...A 8 MEMO ...
Page 15: ...6 MEMO ...
Page 29: ...1 FUNCTIONS AND CONFIGURATION 1 14 MEMO ...
Page 139: ...4 STARTUP 4 38 MEMO ...
Page 187: ...5 PARAMETERS 5 48 MEMO ...
Page 221: ...6 NORMAL GAIN ADJUSTMENT 6 34 MEMO ...
Page 259: ...8 TROUBLESHOOTING 8 8 MEMO ...
Page 265: ...9 DIMENSIONS 9 6 MEMO ...
Page 273: ...10 CHARACTERISTICS 10 8 MEMO ...
Page 339: ...12 COMMUNICATION FUNCTION MITSUBISHI ELECTRIC GENERAL PURPOSE AC SERVO PROTOCOL 12 34 MEMO ...







































































