





























User Manual
Appendix D
GFK-1742F
Jan 2020
Tuning Digital and Analog Servo Systems
436
Tuning the Torque Mode Velocity Loop
The proper method to tune the velocity loop is to separate the velocity loop from the
position loop. To achieve this separation, a method must be used to directly send velocity
commands without using the position loop control. The DSM module has several modes
that will allow the user to send a velocity command directly to the velocity loop. Two
methods are as follows:
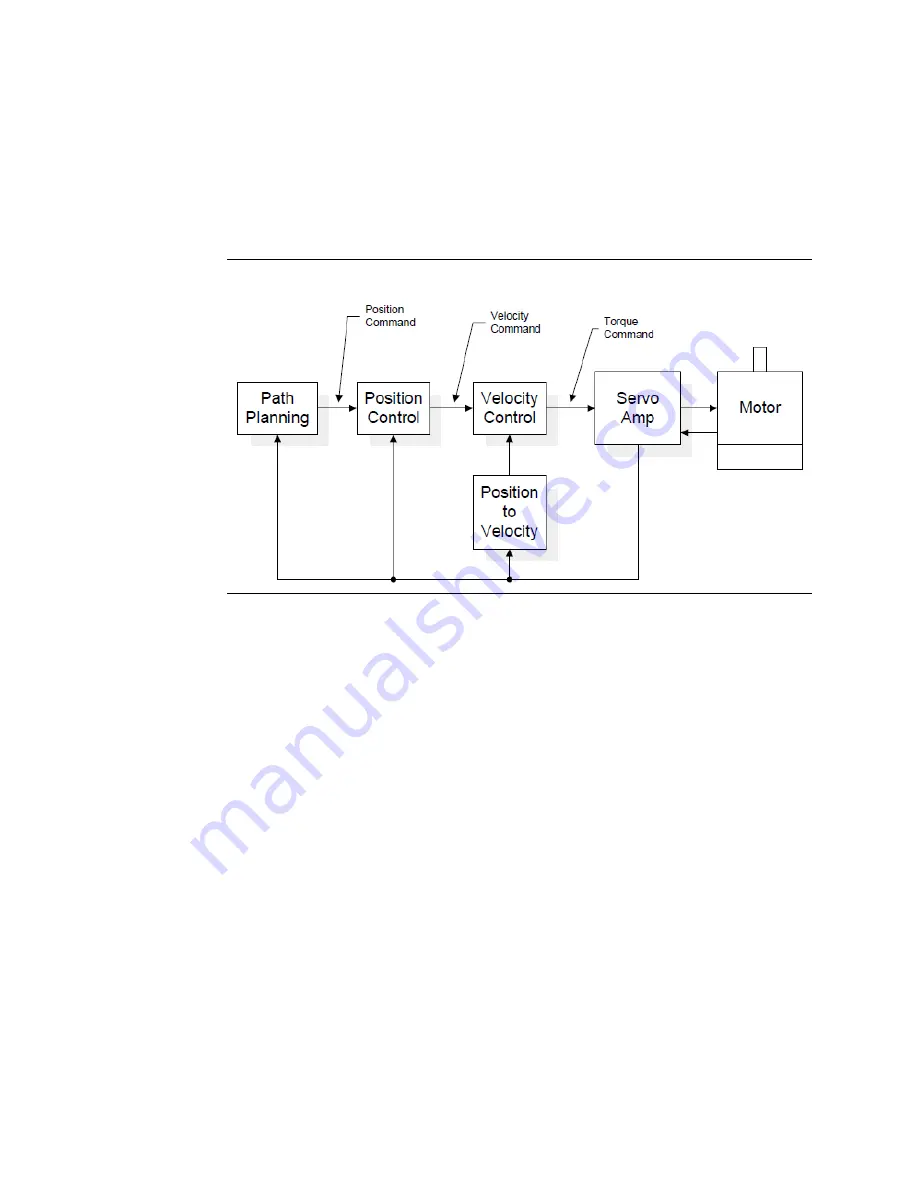
Figure 203: Analog Mode Torque Interface Control Loops Block Diagram
Method #1:
The Force Servo Velocity %AQ immediate command (34h) will send a velocity command
directly to the velocity loop. This command is different from the Move at Velocity
Command, which uses the position loop to generate the command. This is important since
the position loop should not be interacting with the velocity loop at this point in the tuning
process. The Force Servo Velocity %AQ command allows the user to generate a step change
in the velocity. The velocity command step is then used to generate the velocity loop step
response. The user should note that when a velocity command step change is performed
the acceleration is limited only by the bandwidth of the velocity loop. In some applications
this can cause damage to the controlled device due to the high acceleration rate.