





























User Manual
Chapter 4
GFK-1742F
Jan 2020
Configuration
102
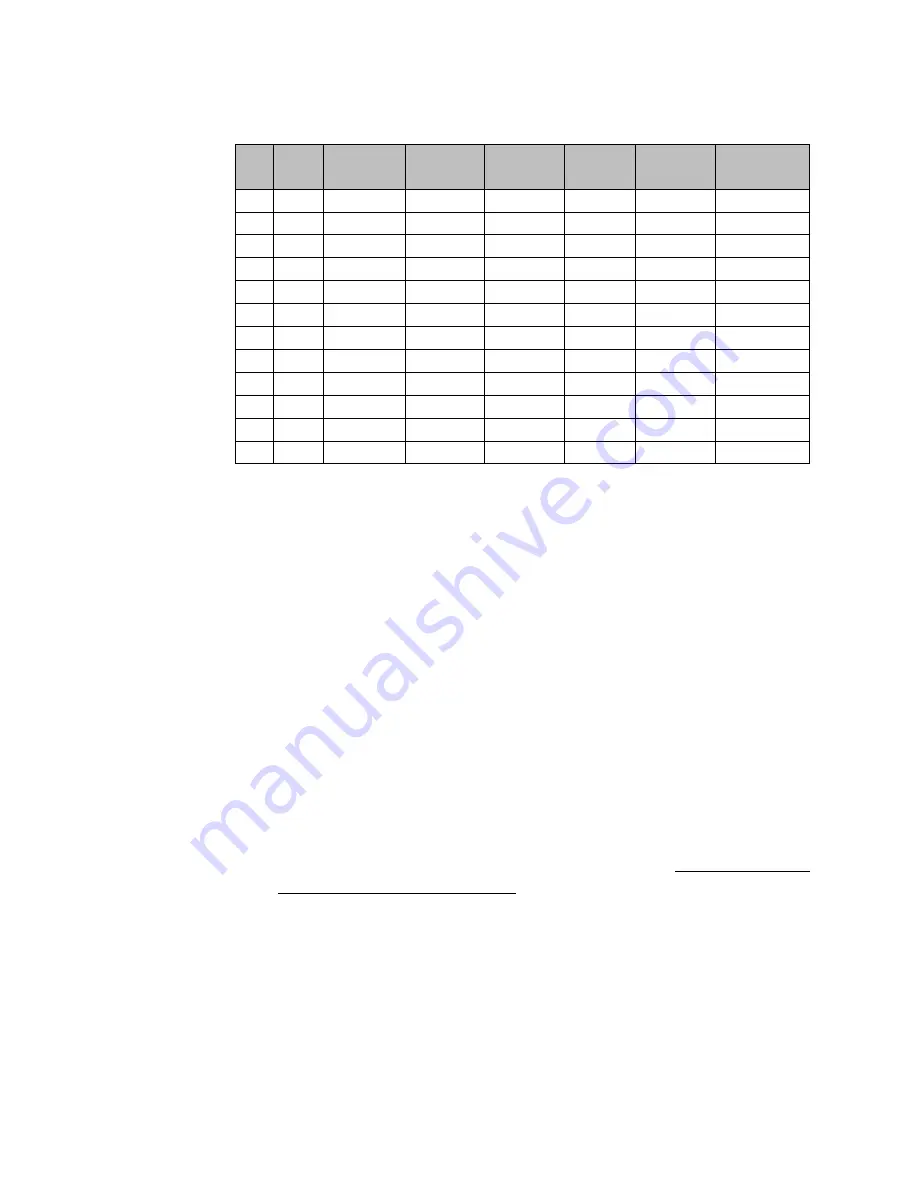
Table 28: Digital Axis Configurations
Item # Axes Axis 1
Axis 2
Axis 3
Axis 4
Local Logic Sample Rate
(ms)
1.
4
Digital Servo Digital Servo Analog Servo Disabled
Disabled
2.0
2.
4
Digital Servo Digital Servo Analog Servo Disabled
Enabled
2.0
3.
4
Digital Servo Digital Servo Auxiliary Axis Disabled
Disabled
2.0
4.
4
Digital Servo Digital Servo Auxiliary Axis Disabled
Enabled
2.0
5.
3
Digital Servo Digital Servo Analog Servo NA
Disabled
2.0
6.
3
Digital Servo Digital Servo Analog Servo NA
Enabled
2.0
7.
3
Digital Servo Digital Servo Auxiliary Axis NA
Disabled
2.0
8.
3
Digital Servo Digital Servo Auxiliary Axis NA
Enabled
2.0
9.
2
Digital Servo Digital Servo NA
NA
Disabled
2.0
10.
2
Digital Servo Digital Servo NA
NA
Enabled
2.0
11.
1
Digital Servo NA
NA
NA
Disabled
2.0
12.
1
Digital Servo NA
NA
NA
Enabled
2.0
1.02 I/Q/AI/AQ Len. Displays the beginning addresses and number of %I, %Q, %AI, and
%AQ references assigned to the DSM314. The reference sizes are set when the user
configures the number of axes.
1.03 Axis n Mode. These parameters define the command output types provided to the
servo sub-systems. Digital Servo selects a special digital output for Digital servo
drives. If Digital Servo is selected, Axes 1 and 2 must be digital. Analog Servo selects
a +/-10-volt velocity command or +/- 10-volt torque command for standard analog
servo drives. The torque or velocity interface is configured by the Analog Servo
Command setting in the module configuration. Auxiliary Axis disables the position
loop so that the internal command generator and encoder position input can be
used for follower or cam functions. If any axis connector is used as a master source
input for follower mode, it should be configured as Auxiliary Axis. An Auxiliary Axis
will output an analog voltage proportional to Commanded Velocity if Velocity
Feedforward is set to a non-zero value. When an axis is configured as Auxiliary Axis
and identified as Limited Aux Axis in Table 27, position feedback is available but
internal motion command generation is not available. An axis configured as
Disabled (applies to Axis 4 only) provides analog and digital i/o but no position
feedback or internal motion command generation. (Default = Analog Servo (Axis 1-
2), Aux Axis (Axis 3), Disabled (Axis 4) ).