





























User Manual
Appendix A
GFK-1742F
Jan 2020
Error Reporting
371
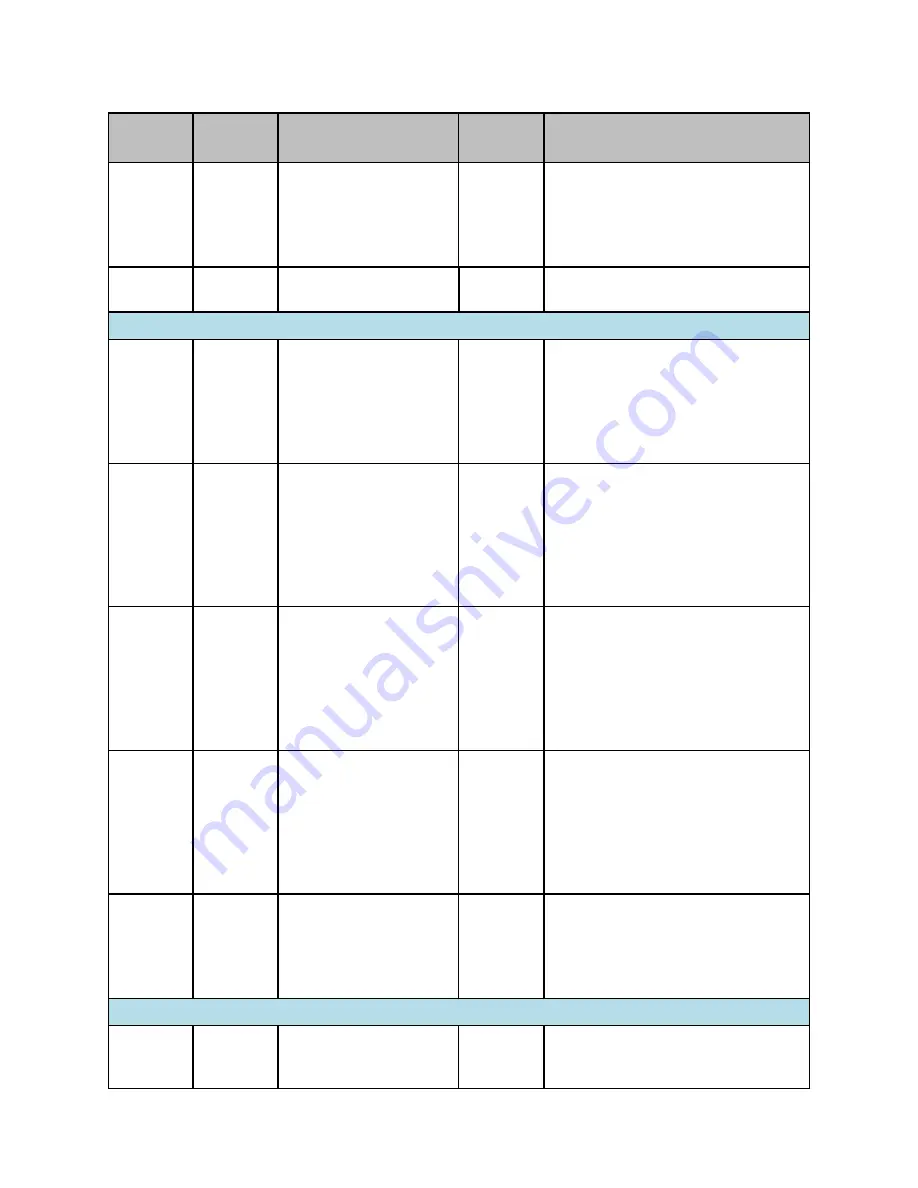
Error Code
(hex)
Response Description
Error Type Possible Cause
42
Status Only
Jog while Force Digital Servo
Velocity error
Axis
The user set a Jog Q bit while the module
was executing a Force Digital Velocity (34h)
or Force Analog Output (24h) AQ command.
The AQ command must be removed before
executing a Jog.
43
Status Only
Jog while Program Selected
and not Feedholding error
Axis
If a program is running, the DSM can only
Jog if the Feedhold Q bit is set.
Force Digital Servo Velocity Errors
47
Status Only
Force Digital Servo Velocity or
Force Analog Output while
Jog error
Axis
The user executed a Force Digital Servo
Velocity (34h) or Force Analog Output (24h)
AQ command while the module is executing
a Jog function. The Jog function must be
halted prior to executing Force Digital Servo
Velocity or Force Analog Output.
48
Status Only
Force Digital Servo Velocity or
Force Analog Output while
Move at Velocity error
Axis
The user executed a Force Digital Servo
Velocity (34h) or Force Analog Output (24h)
AQ command while the module is executing
a Move at Velocity function. The Move at
Velocity command must be halted prior to
executing Force Digital Servo Velocity or
Force Analog Output.
49
Status Only
Force Digital Servo Velocity or
Force Analog Output while
Program Selected error
Axis
The user executed a Force Digital Servo
Velocity (34h) or Force Analog Output (24h)
AQ command while the module is executing
a motion program. The motion program
must be halted (Program Active I bit off)
prior to executing Force Digital Servo
Velocity or Force Analog Output.
4A
Status Only
Force Digital Servo Velocity or
Force Analog Output while
Follower Enabled error
Axis
The user executed a Force Digital Servo
Velocity (34h) or Force Analog Output (24h)
AQ command while the follower was
enabled. The follower must be disabled
(Follower Enabled I bit off) prior to executing
Force Digital Servo Velocity or Force Analog
Output.
4B
Status Only
Force Analog Output while in
Analog Torque mode
Axis
The user executed a Force D/A (24h) AQ
command while the servo was configured
for Analog Torque Mode. Force Analog
Output. is not supported in Analog Torque
Mode
Set Position Errors
50
Status Only
Set Position while Program
Selected error
Axis
The user executed a Set Position command
while a Motion Program was selected to
execute. The motion program must be