





























SV800/SV800A User Manual 2 Production Introduction
15
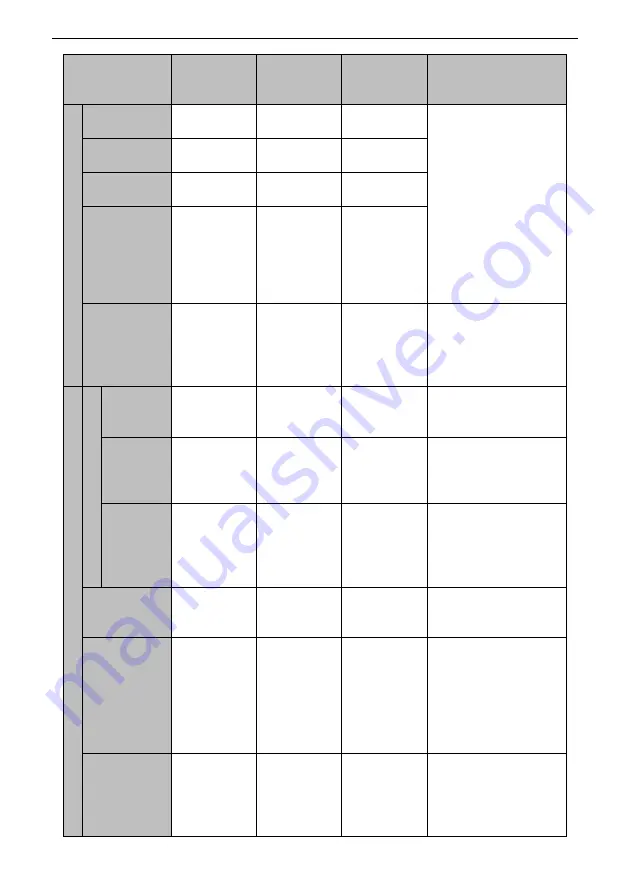
Control mode
Sensorless
vector control
(IM.SVC)
With sensor
vector control
(IM.VC)
V/F control
(IM.VF)
Remarks
Bas
ic
p
erf
o
rma
n
ce
p
ar
ame
ter
(T
o
rq
u
e
co
n
tro
l)
Ute precision
<3% motor rated
torque
<3% motor rated
torque
-
When performing torque
control, motor parameters
self-learning is required at
the room temperature. If
can’t take self-learning and
the motor parameters can
only be manually input, the
torque control index will
decrease; In addition, the
control index in the constant
power interval will decrease
slightly.
Reentry accuracy
<0.5% rated
motor torque
<0.5% rated
motor torque
-
Fluctuation
accuracy
<0.5% rated
motor torque
<0.5% rated
motor torque
-
Response time
<5ms (motor
rated torque)
<5ms (motor
rated torque)
-
Zero servo
control
Not support
Support
-
Under VC control mode,
when zero servo control is
performed, the motor shaft
would has no swing and no
vibration.
Mai
n
co
n
tr
o
l f
u
n
ct
io
n
Sel
f-
le
ar
n
in
g
Motor
self-learning
Full mode and
static mode
Full mode and
static mode
Static mode
For V/F control, the primary
side resistance of the motor
is learned only.
Inverter
self-learning
Support
Support
Support
Nonlinear parameters
self-learning is performed
under any mode of the
frequency inverter.
Parameter
consistency
<
1%
<
1%
<
1%
There may be slight
fluctuations in motor
temperature as the
self-learning process
changes.
Initial excitation
of the terminal
Support
Support
-
Use it with vector control
together, the start-up time
can be reduced to 0ms.
Terminal
magnetic flux
brake
Support
Support
Support
When the terminal brake is
used, the motor rotational
kinetic energy is completely
consumed on the motor
stator and rotor, so
long-term using will
adversely affect the motor.
Speed/torque
switching
Support
Support
-
It can be switched manually
with the terminal or
switched automatically by
system or parameters
setting.





















































